電子工作
M5Stack BLDCモータードライバユニット DRV11873 おイジり
前回はM5Stack用BLDCモータードライバユニットの味見動作の確認を実施しました。 https://homemadegarbage.com/bldc-unit01 迅速な回転方向転換や低速での起動が難しく倒立振子への利用は難しいことが分かったのですが、せっかくな...
電子工作 2024.5.25 お父ちゃん ![]()

M5Stack BLDCモータードライバユニット 火入れ
M5Stack用BLDCモータードライバユニットを購入しました。 [bc url="https://www.switch-science.com/products/9651"] もろもろ味見してみたので報告いたします。 1st 火入れ&味見 開封から火入れをライ...
電子工作 2024.5.22 お父ちゃん ![]()
二足歩行ロボット 歩行再考
以前製作した二足歩行ロボットをあらためておいじりしたいと思いたちました。 https://homemadegarbage.com/robottrip01 前回は以下のようにロボットの歩行の検証を実施しました。 更に歩行について研究しましたので報告いたします。...
電子工作 2024.5.9 お父ちゃん ![]()
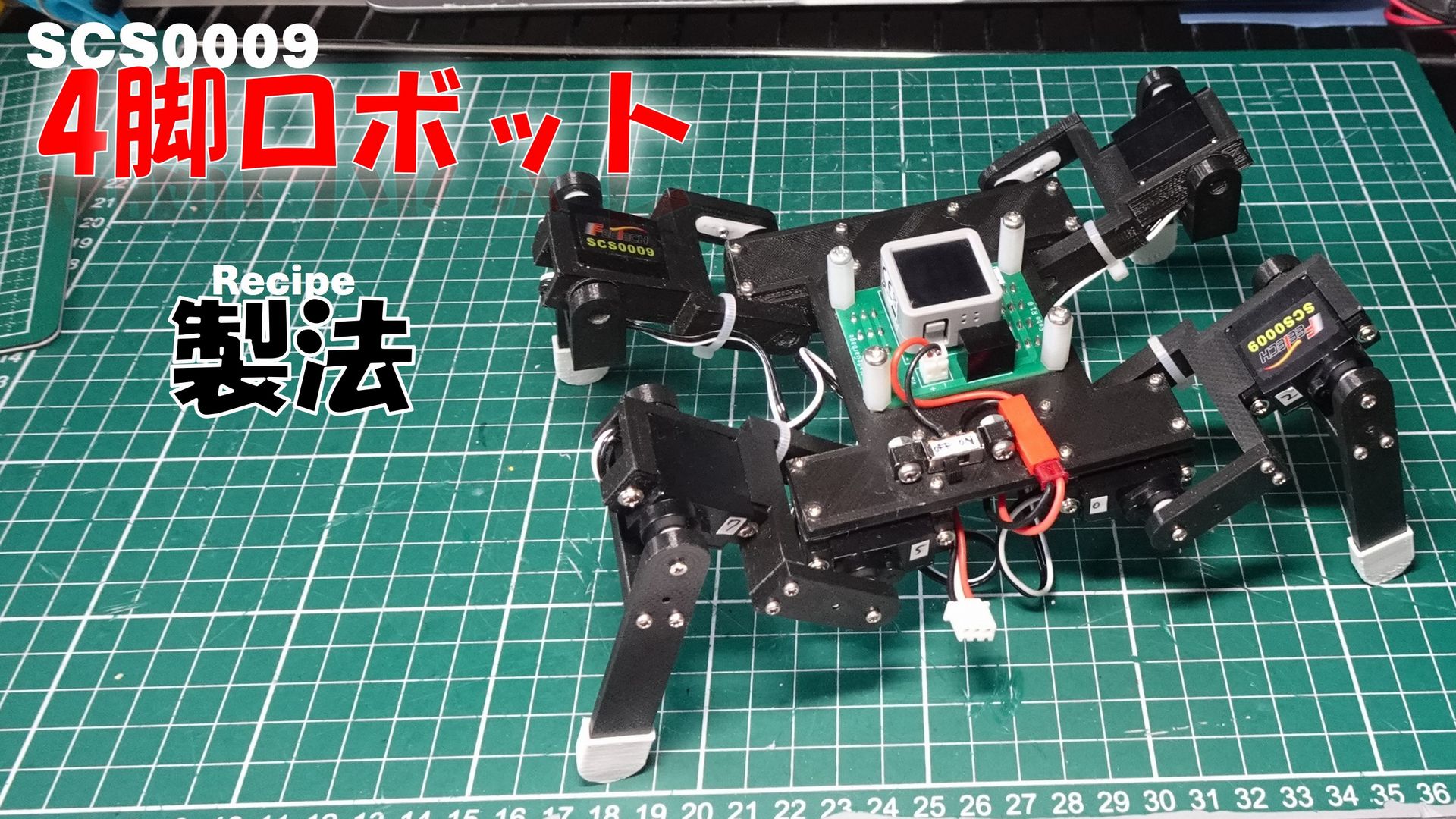
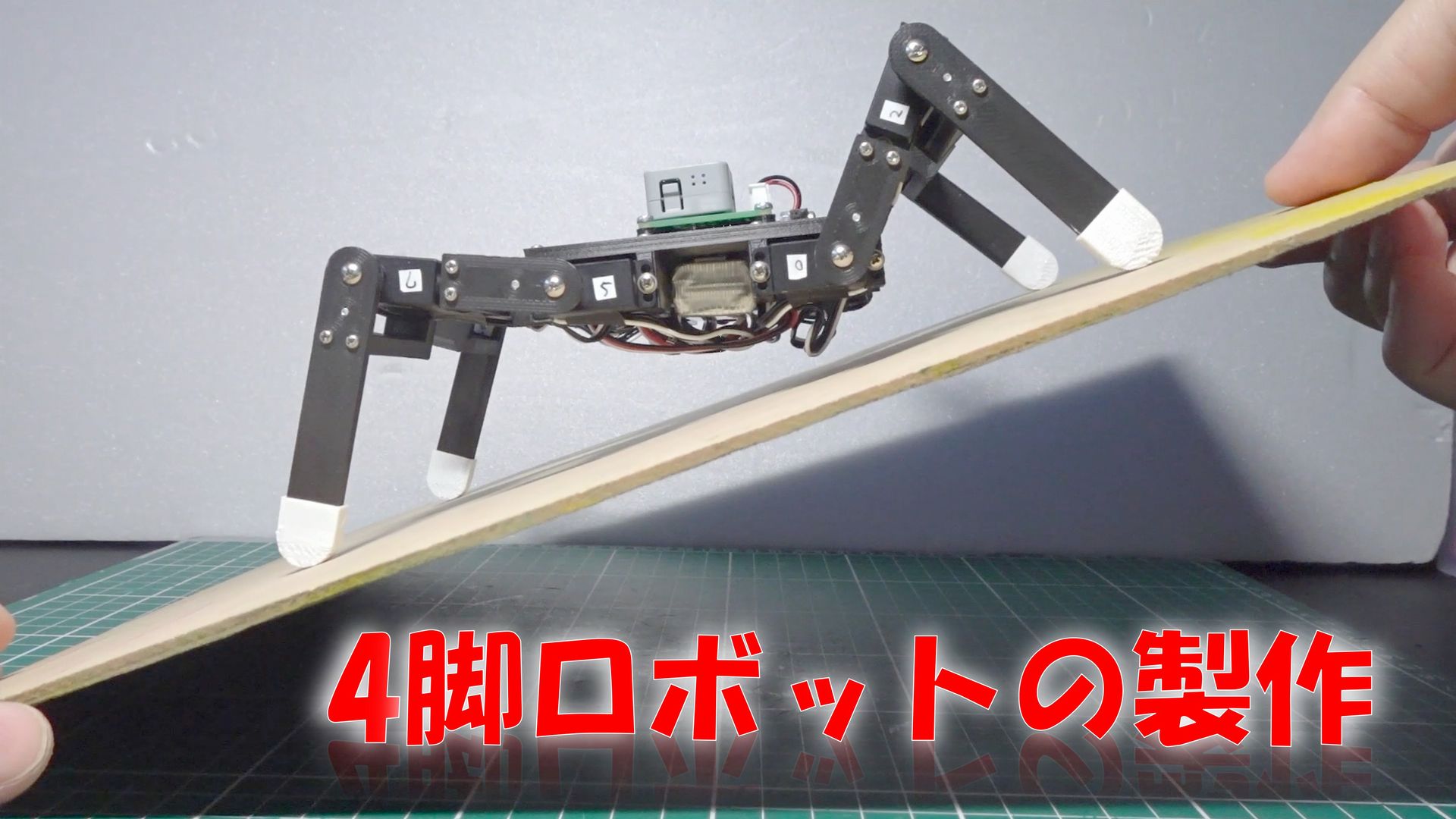
SCS0009を用いた4脚ロボットの製法
はじめに これまでに各種サーボモータを使用して4脚ロボットを製作してきました。 以下の記事ではシリアルサーボの STS3032 と SCS0009 、そしてPWMマイクロサーボでの比較を実施しました。 https://homemadegarbage.com/robotdog03// &nbs...
電子工作 2024.4.23 お父ちゃん ![]()
コロコロロボット開発
最近はYouTubeライブ配信に凝っており、これまでは事前に開発した作品の組み立ての様子を配信しておりました。 https://homemadegarbage.com/youtube-live-01/ だいぶ配信にも慣れYouTubeライバーとしての自覚も芽生えてきましたので、今...
電子工作 2024.4.20 お父ちゃん ![]()
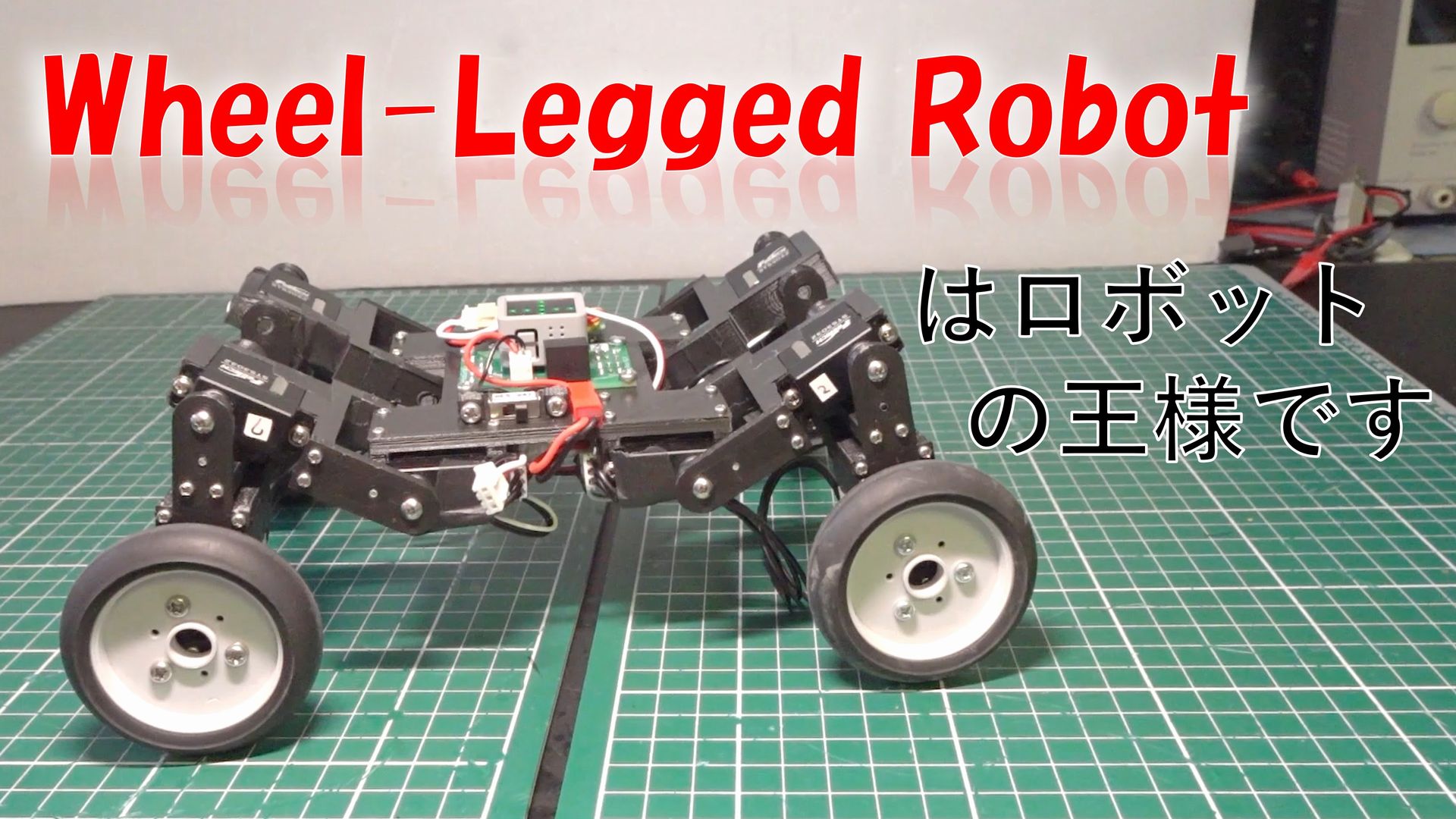
Wheel-Legged Robot はロボットの王様です
今回は Wheel-Legged Robot について考えました。 Wheel-Legged Robotは過去に何度か製作しております。 https://homemadegarbage.com/wheel-leg/ https://homemadegarbage.com/spresense23...
電子工作 2024.3.22 お父ちゃん ![]()

4脚ロボット SCS0009で更にしがむ
前回はシリアルサーボSCS0009による4脚ロボットでバク転動作を検討し実現に至りました。 https://homemadegarbage.com/robotdog04// ここでは更にこの4脚ロボットをしがむ格好で検証を進めました。 基板製作 Feetechの...
電子工作 2024.3.20 お父ちゃん ![]()
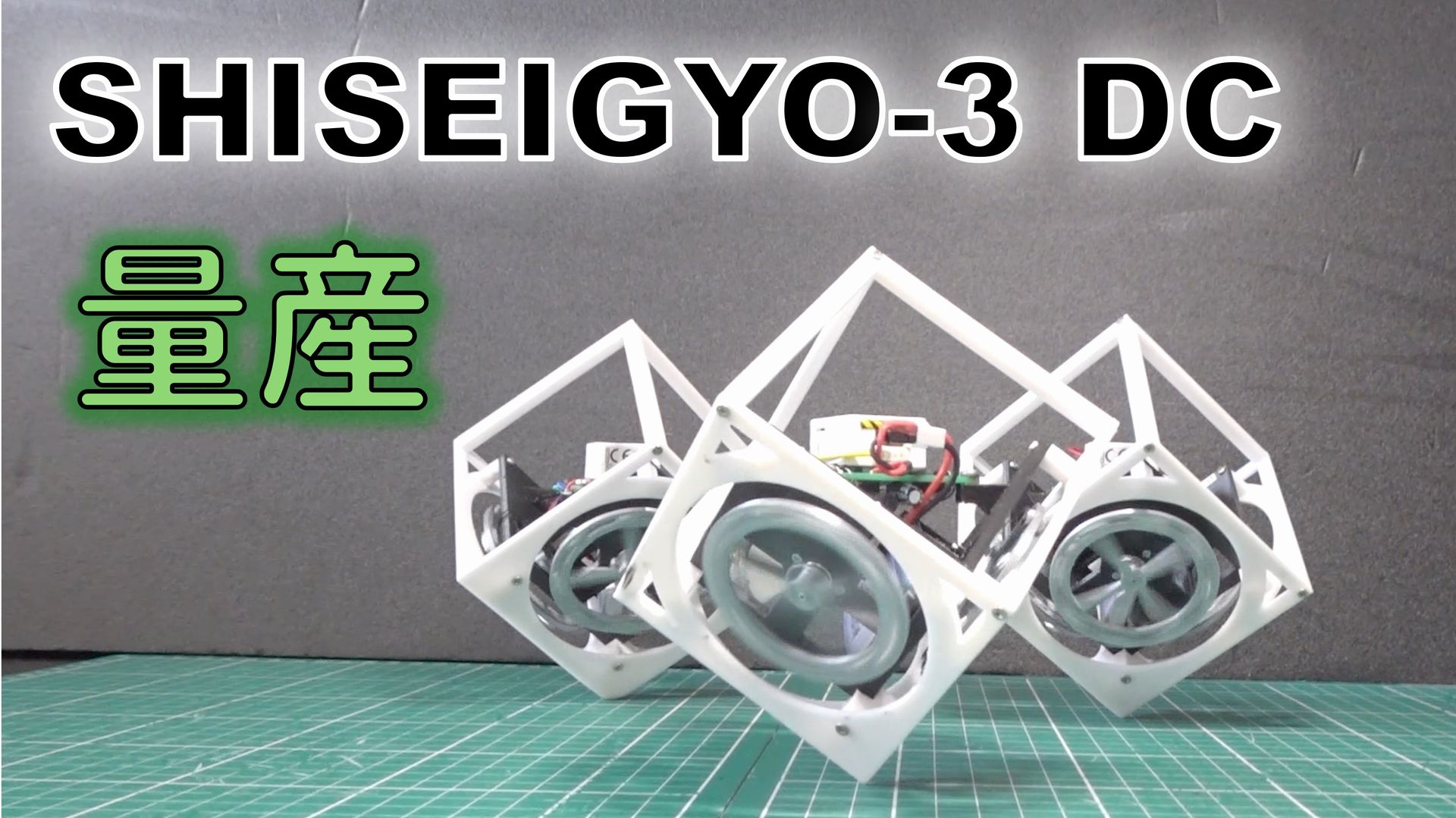
SHISEIGYO-3 DC 量産 ーリアクションホイールへの道68ー
前回は小型コアレスモータを用いて3軸姿勢制御モジュールを実現しました。 https://homemadegarbage.com/reactionwheel67// ここでは更にブラッシュアップを施しましたので報告いたします。 基...
電子工作 2024.3.16 お父ちゃん ![]()
4脚ロボット SCS0009でバク転
前回は各種サーボモータで4脚ロボットの動作比較を実施いたしました。 https://homemadegarbage.com/robotdog03/ ここではシリアルサーボSCS0009でのバク転動作を更に掘り下げましたので報告いたします。 前回の比...
電子工作 2024.3.9 お父ちゃん ![]()


SHISEIGYO-3 DC 爆誕 ーリアクションホイールへの道67ー
魅惑の3連休を前にふとDCモータで3軸姿勢制御モジュール作れないべか? と思い立ちました。 DCモータによる姿勢制御モジュールは1軸はもちろんのこと2軸までは確認済です。 https://homemadegarbage.com/reactionwheel52// 新規案件は準...
電子工作 2024.2.25 お父ちゃん ![]()
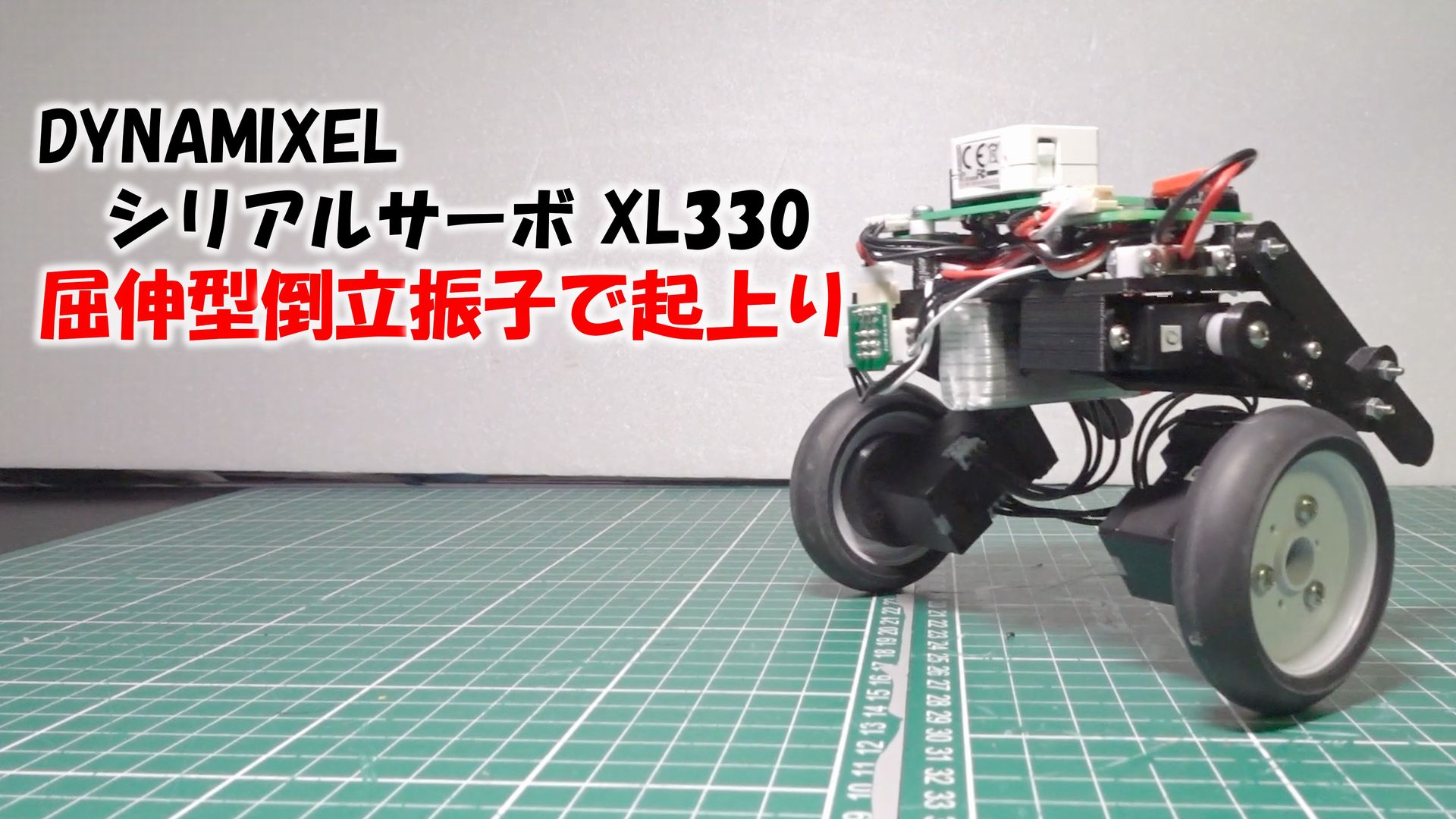
DYNAMIXEL シリアルサーボ XL330 屈伸型倒立振子で起上り
前回は DYNAMIXEL シリアルサーボモータ XL330-M077-T を用いて屈伸型倒立振子を製作しました。 https://homemadegarbage.com/bala23/ ホイール駆動用にXL330を採用し、足駆動用にFeetechのシリアルサーボ STS3032を用いています。...

6重倒立に向けて③ ーリアクションホイールへの道66ー
前回は5重倒立の検証を実施しました。 https://homemadegarbage.com/reactionwheel65 ここでは遂に6重倒立に挑戦します。 6重倒立 あらためて6重倒立に使用するモジュールについて記載します。 上から以下のように積み上げま...
電子工作 2024.2.12 お父ちゃん ![]()

6重倒立に向けて② ーリアクションホイールへの道65ー
前回は6重倒立の実現に向けて本格的に始動し、4重倒立の確認を行いました。 https://homemadegarbage.com/reactionwheel64// ここでは5重倒立の検証をします。 5重倒立 記録更新 まずはモチベーションの維持と向上のために5...
電子工作 2024.2.7 お父ちゃん ![]()