電子工作
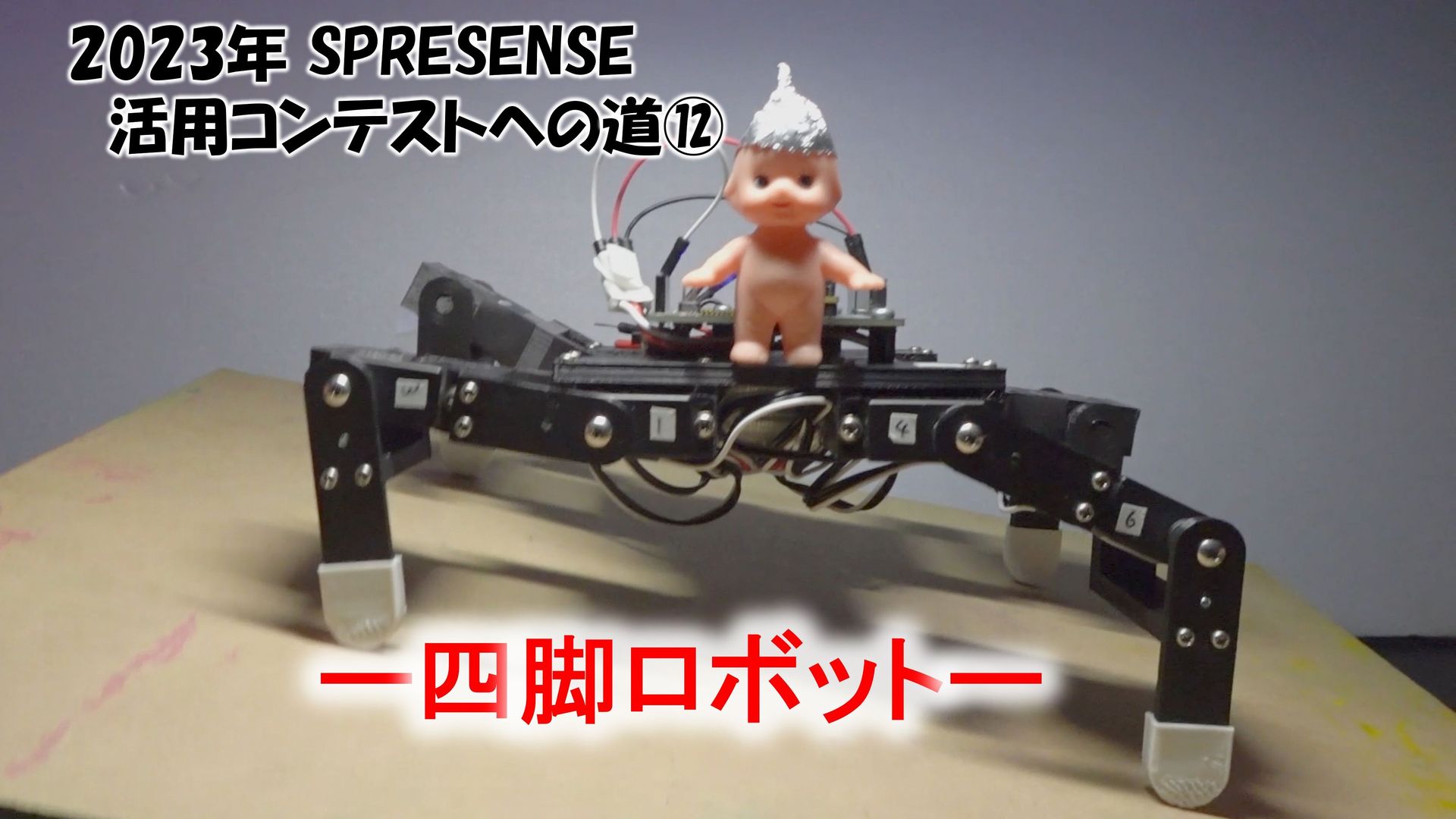
2023年 SPRESENSE活用コンテスト への道⑫ ー四脚ロボットー
前回はSPRESENSEによる屈伸型倒立振子を製作し動作確認しました。 https://homemadegarbage.com/spresense23-11/ いよいよ 2023年 SPRESENSE活用コンテスト への応募に向けて、ロボット製作を進めます。 こ...
電子工作 2024.1.10 お父ちゃん ![]()

2023年 SPRESENSE活用コンテスト への道⑪ ー屈伸型倒立振子ー
前回はSPRESENSEによる倒立振子を製作し動作確認しました。 https://homemadegarbage.com/spresense23-10// 屈伸型倒立振子製作 前回製作した倒立振子に更にシリアルサーボ STS3032を追加して屈伸型倒立振子を製作しま...
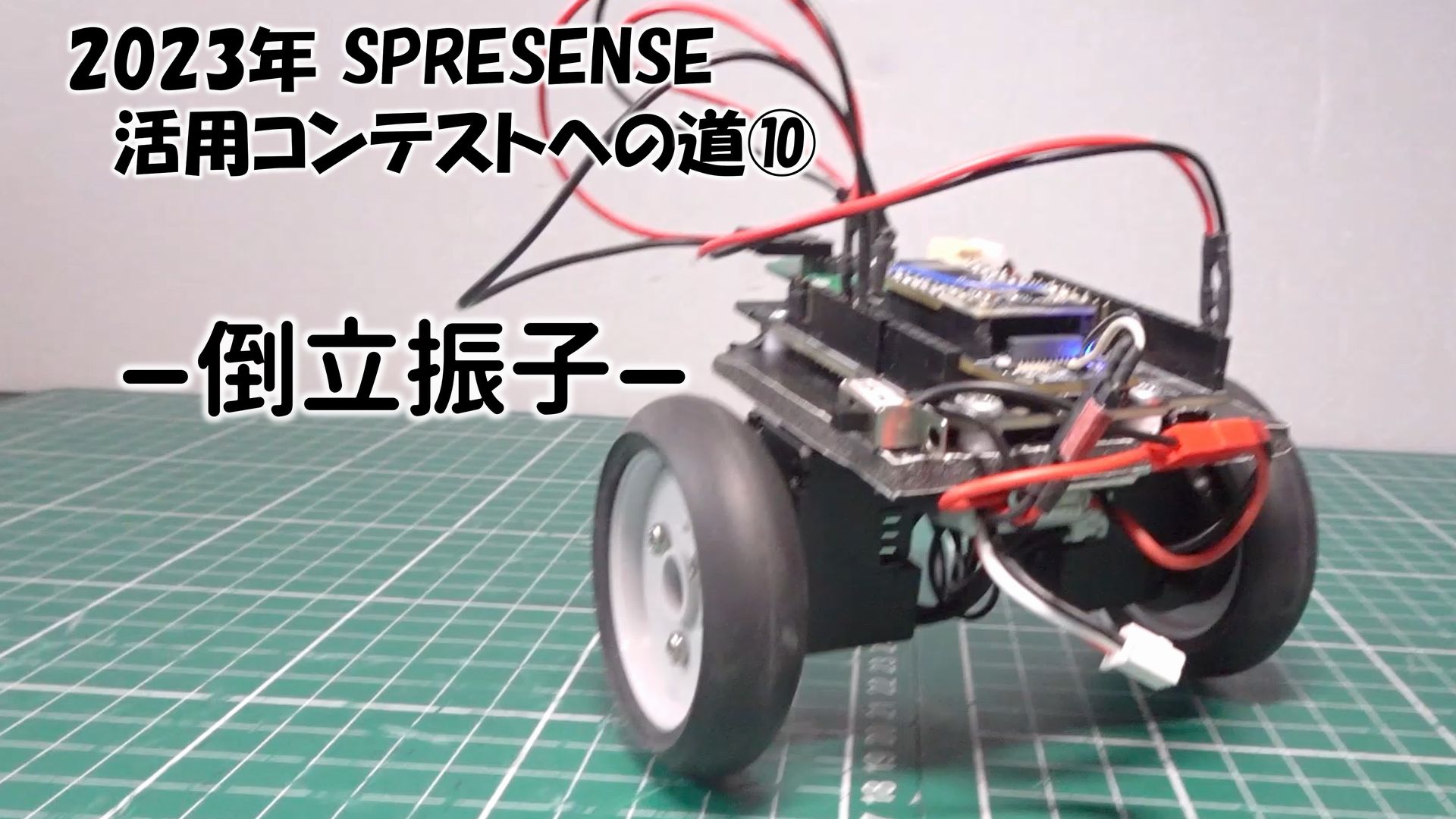
2023年 SPRESENSE活用コンテスト への道⑩ ー倒立振子ー
前回はBLEボード BLE1507 をソフトウェアシリアル通信対応させてシリアルサーボ XL330とのSPRESENSEによる併用を確認しました。 https://homemadegarbage.com/spresense23-9/ 倒立振子製作 BLEボードとサ...

2023年 SPRESENSE活用コンテスト への道⑨ ーBLE通信4ー
前回は9軸Addon ボードのIMUセンサ BMI270 を用いてSPRESENSE傾斜計を実現しロボット犬の姿勢制御を楽しみました。 https://homemadegarbage.com/spresense23-8/ BLEボードとXL330の併用 本道シリー...
電子工作 2023.12.28 お父ちゃん ![]()
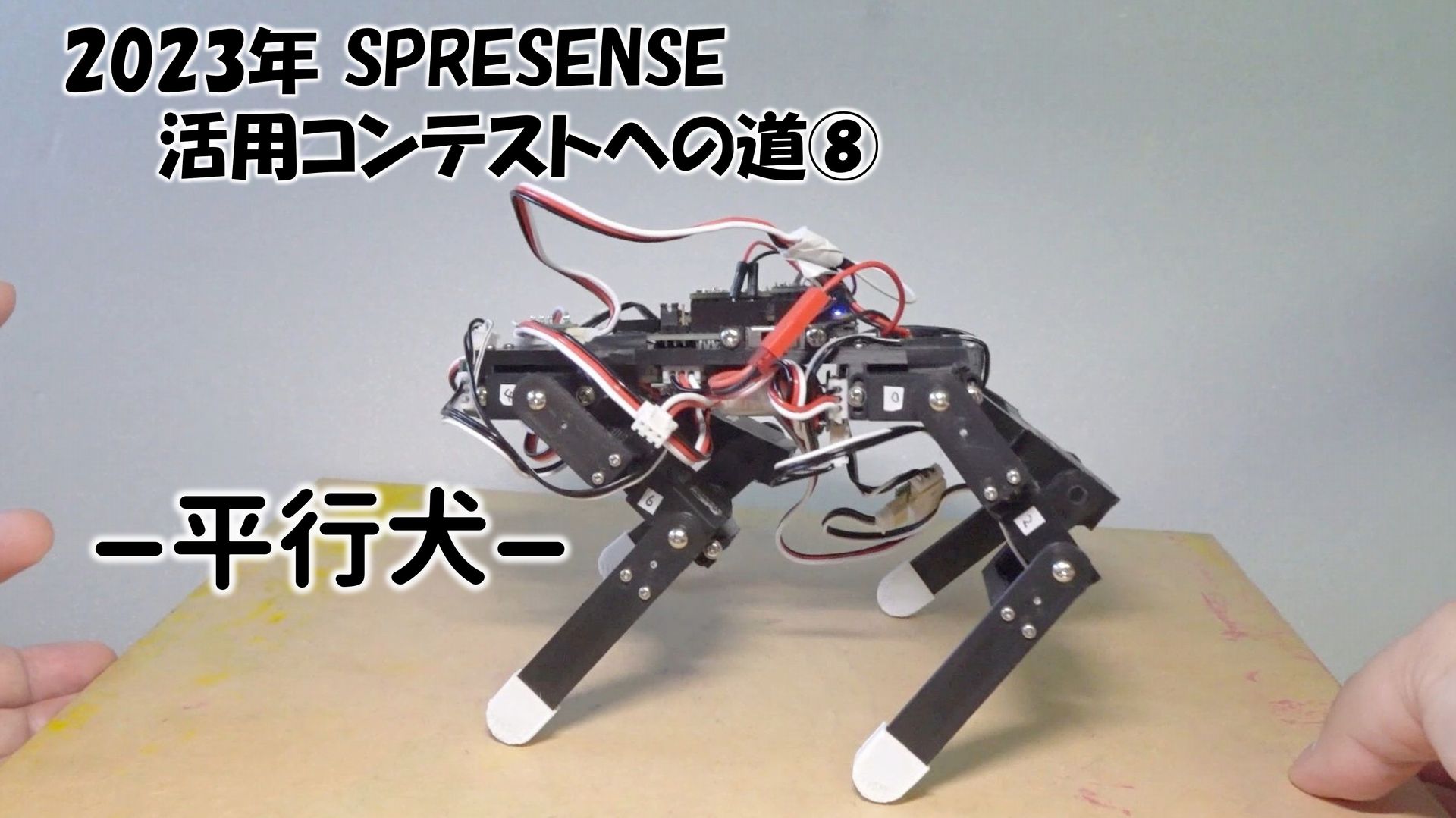
2023年 SPRESENSE活用コンテスト への道⑧ ー平行犬ー
HomeMadeGarbage Advent Calendar 2023 |24日目 前回は 2023年 SPRESENSE活用コンテスト への応募に向けてBLE通信でサーボモータSTS3032ロボット犬の各種制御を楽しみました。 https://homemadegarbage.com/spre...
Advent Calendar / 電子工作 2023.12.24 お父ちゃん ![]()
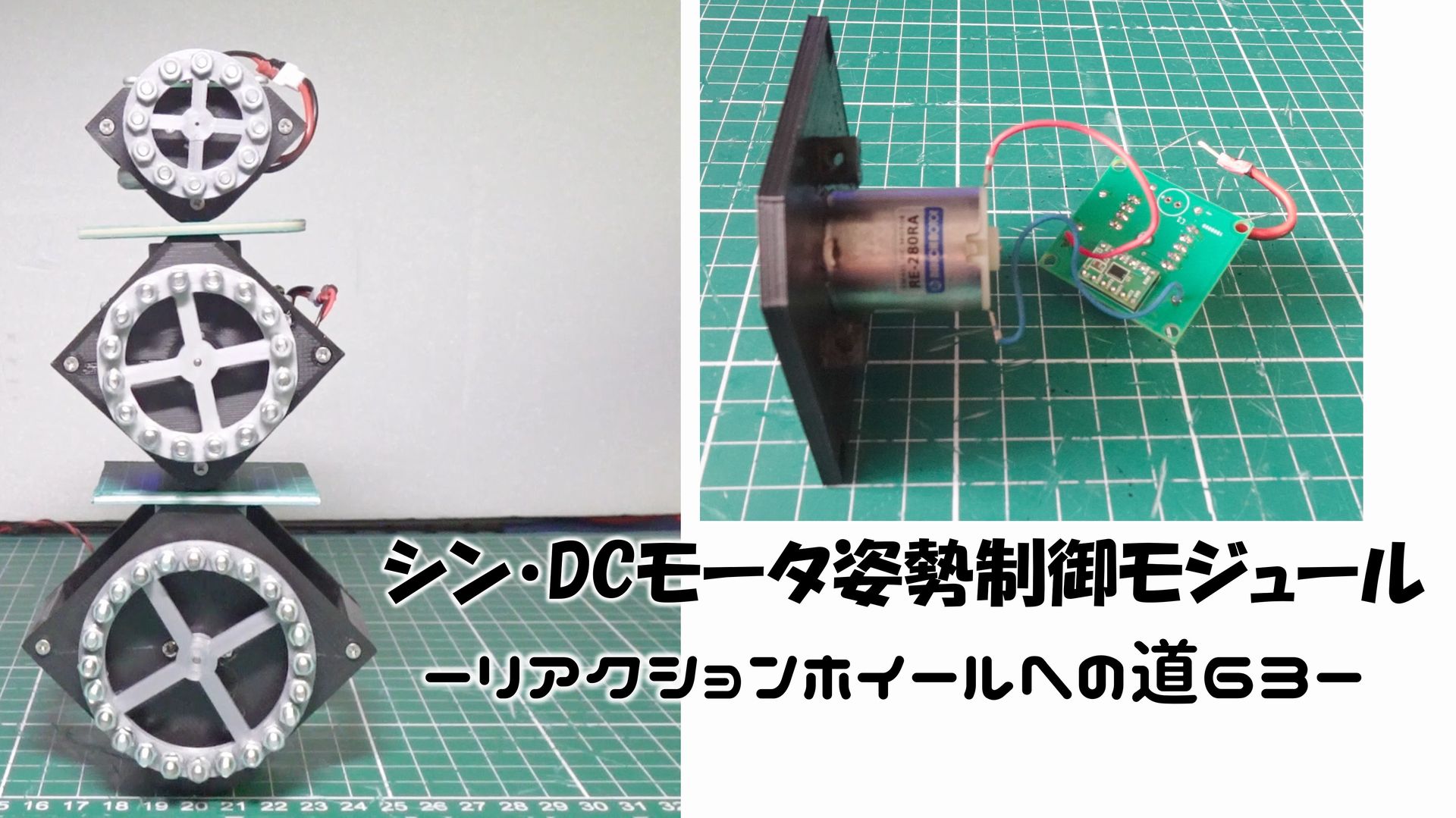
シン・DCモータ姿勢制御モジュール ーリアクションホイールへの道63ー
HomeMadeGarbage Advent Calendar 2023 |22日目 前回から6重倒立に向けて準備を開始しております。 念願の5重倒立達成 ☟詳細はコチラhttps://t.co/uoq9a3fGf2 pic.twitter.com/3I6DR8jhjV — Ho...
Advent Calendar / 電子工作 2023.12.22 お父ちゃん ![]()
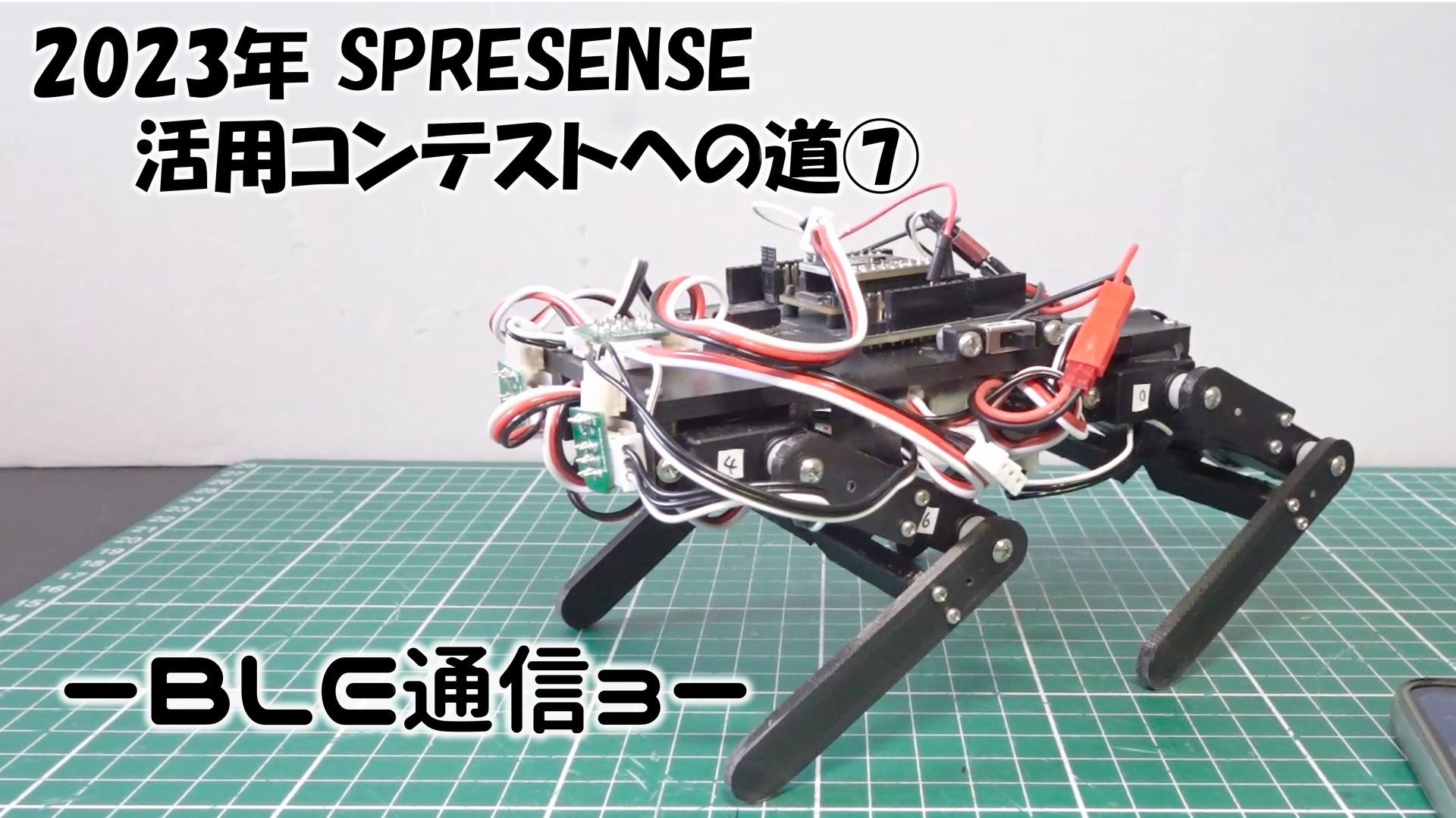
2023年 SPRESENSE活用コンテスト への道⑦ ーBLE通信3ー
HomeMadeGarbage Advent Calendar 2023 |20日目 前回は 2023年 SPRESENSE活用コンテスト への応募に向けてサーボモータSTS3032でロボット犬を構成してSPRESENSEのマルチコア機能を使って動作を確認しました。 https://homema...
Advent Calendar / 電子工作 2023.12.20 お父ちゃん ![]()
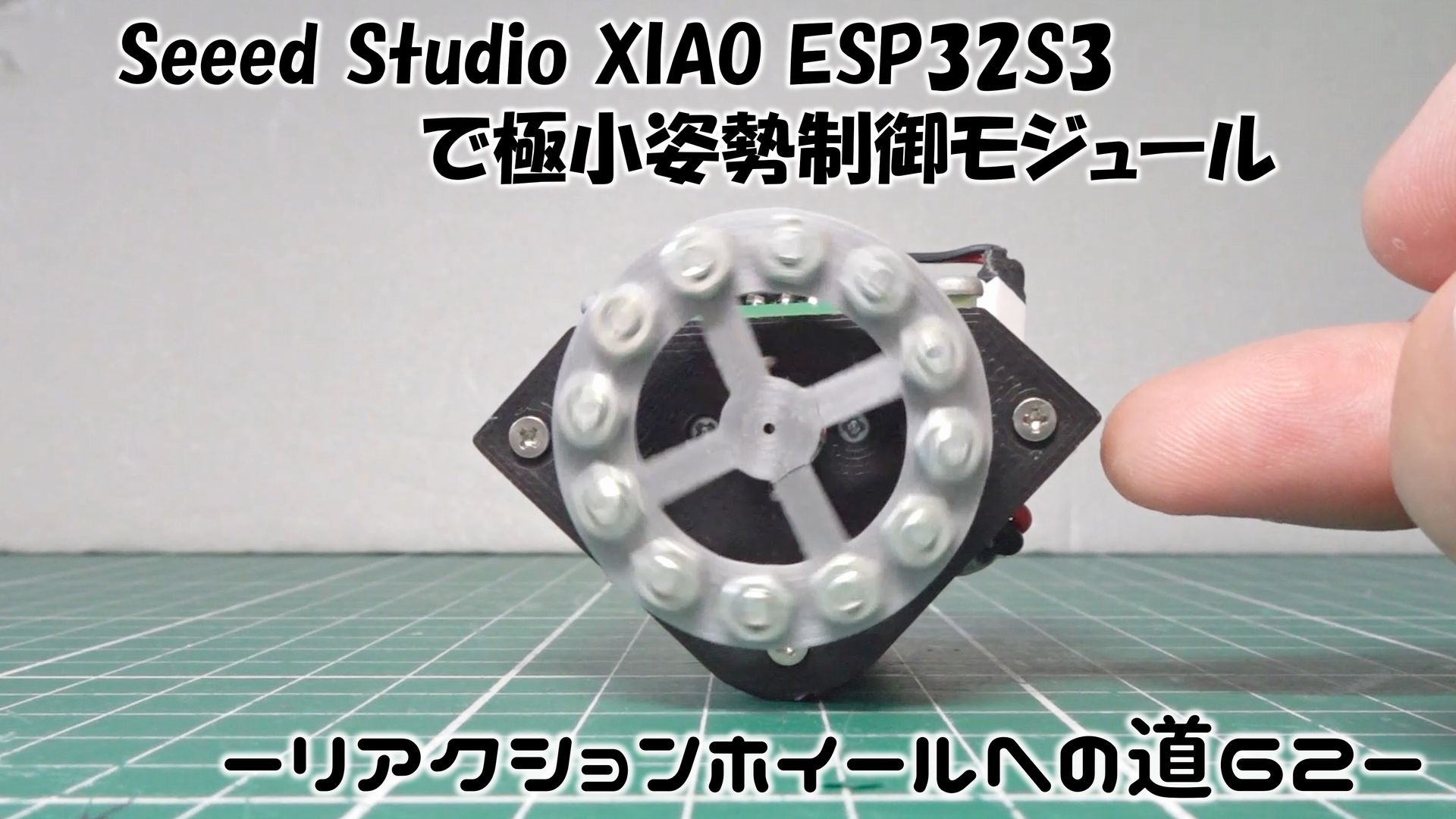
Seeed Studio XIAO ESP32S3 で極小姿勢制御モジュール ーリアクションホイールへの道62ー
HomeMadeGarbage Advent Calendar 2023 |18日目 そろそろ多重倒立がしたくなってきました。たまに来るこの感情 現状の記録は5重。 https://twitter.com/H0meMadeGarbage/status/1640186881903042561 ...
Advent Calendar / 電子工作 2023.12.18 お父ちゃん ![]()
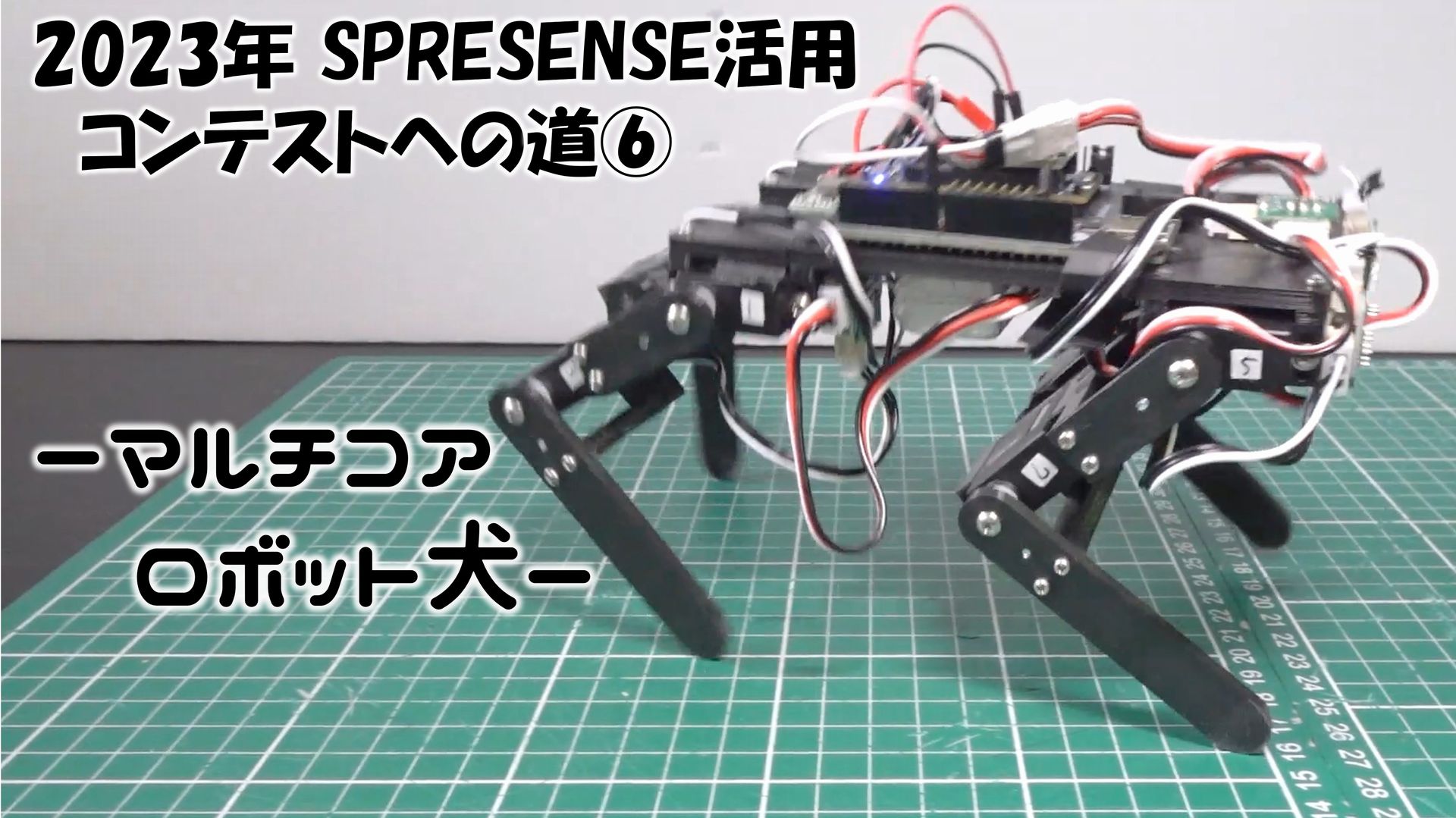
2023年 SPRESENSE活用コンテスト への道⑥ ーマルチコア ロボット犬ー
HomeMadeGarbage Advent Calendar 2023 |16日目 前回は 2023年 SPRESENSE活用コンテスト への応募に向けてサーボモータSTS3032でロボット犬を構成して動作を確認しました。 https://homemadegarbage.com/spresen...
Advent Calendar / 電子工作 2023.12.16 お父ちゃん ![]()
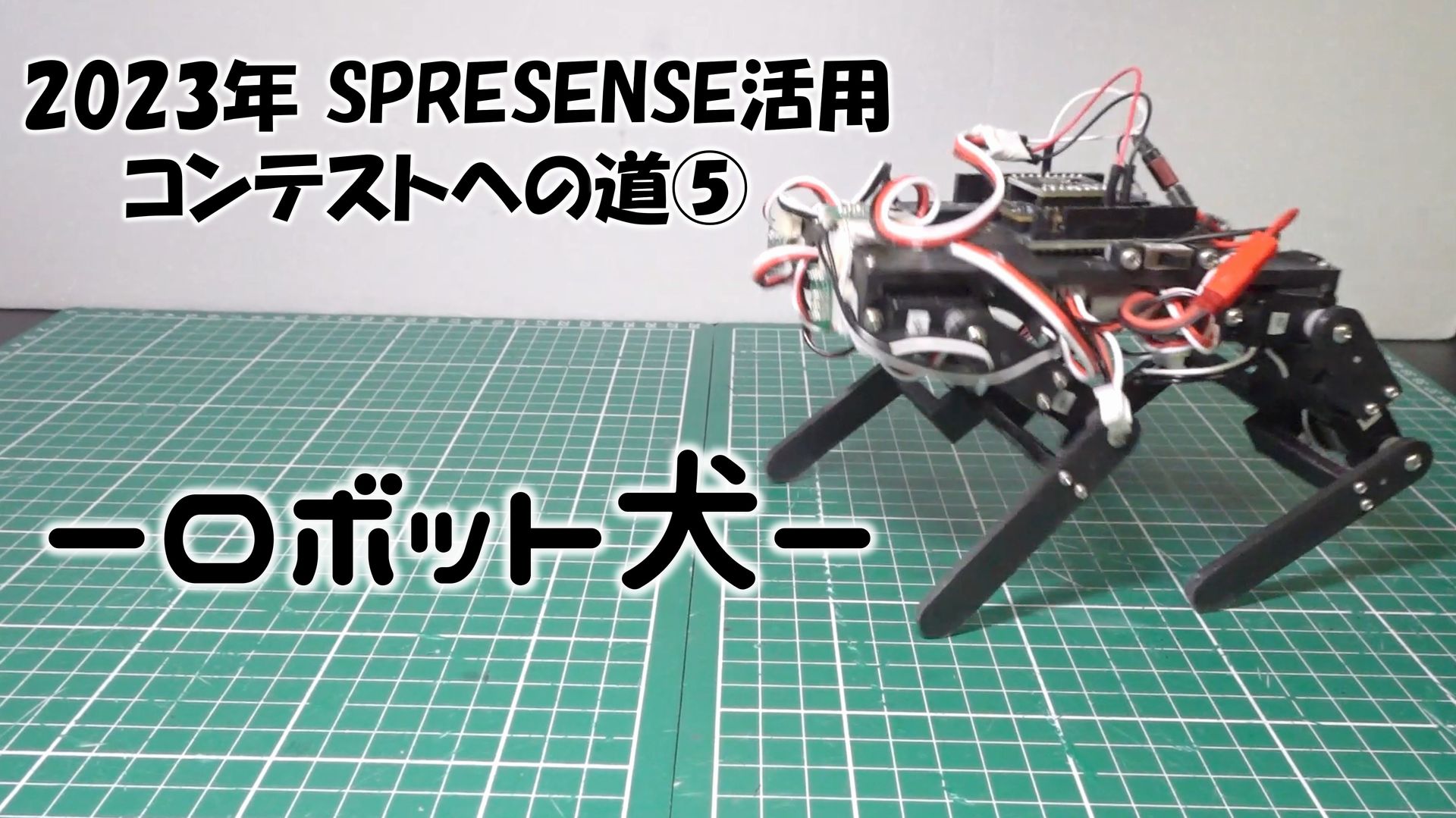
2023年 SPRESENSE活用コンテスト への道⑤ ーロボット犬ー
HomeMadeGarbage Advent Calendar 2023 |14日目 前回は 2023年 SPRESENSE活用コンテスト への応募用に提供いただいたBLEボード BLE1507 を用いてサーボモータのBLE通信遠隔操作を実施しました。 https://homemadegarba...
Advent Calendar / 電子工作 2023.12.14 お父ちゃん ![]()

2023年 SPRESENSE活用コンテスト への道④ ーBLE通信2ー
HomeMadeGarbage Advent Calendar 2023 |12日目 前回は 2023年 SPRESENSE活用コンテスト への応募用に各種サンプル部品を提供いただき、BLEボード BLE1507 を用いてスマホとの通信を確認しました。 https://homemadegarba...
Advent Calendar / 電子工作 2023.12.12 お父ちゃん ![]()
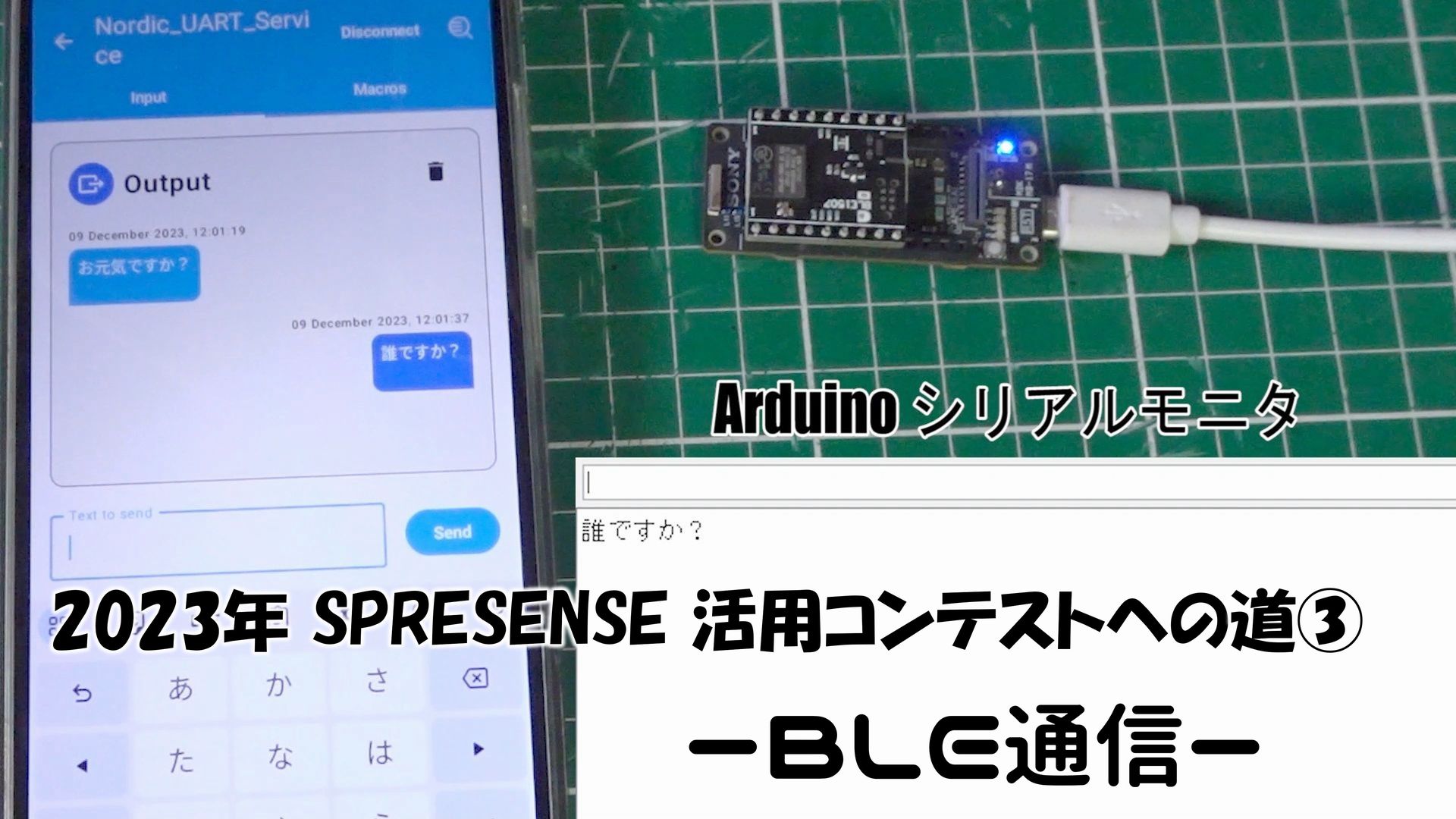
2023年 SPRESENSE活用コンテスト への道③ ーBLE通信ー
HomeMadeGarbage Advent Calendar 2023 |10日目 2023年 SPRESENSE活用コンテスト への応募に向けて前回はマルチコアでの2種のサーボモータ制御を楽しみました。 https://homemadegarbage.com/spresense23-2 サ...
Advent Calendar / 電子工作 2023.12.10 お父ちゃん ![]()
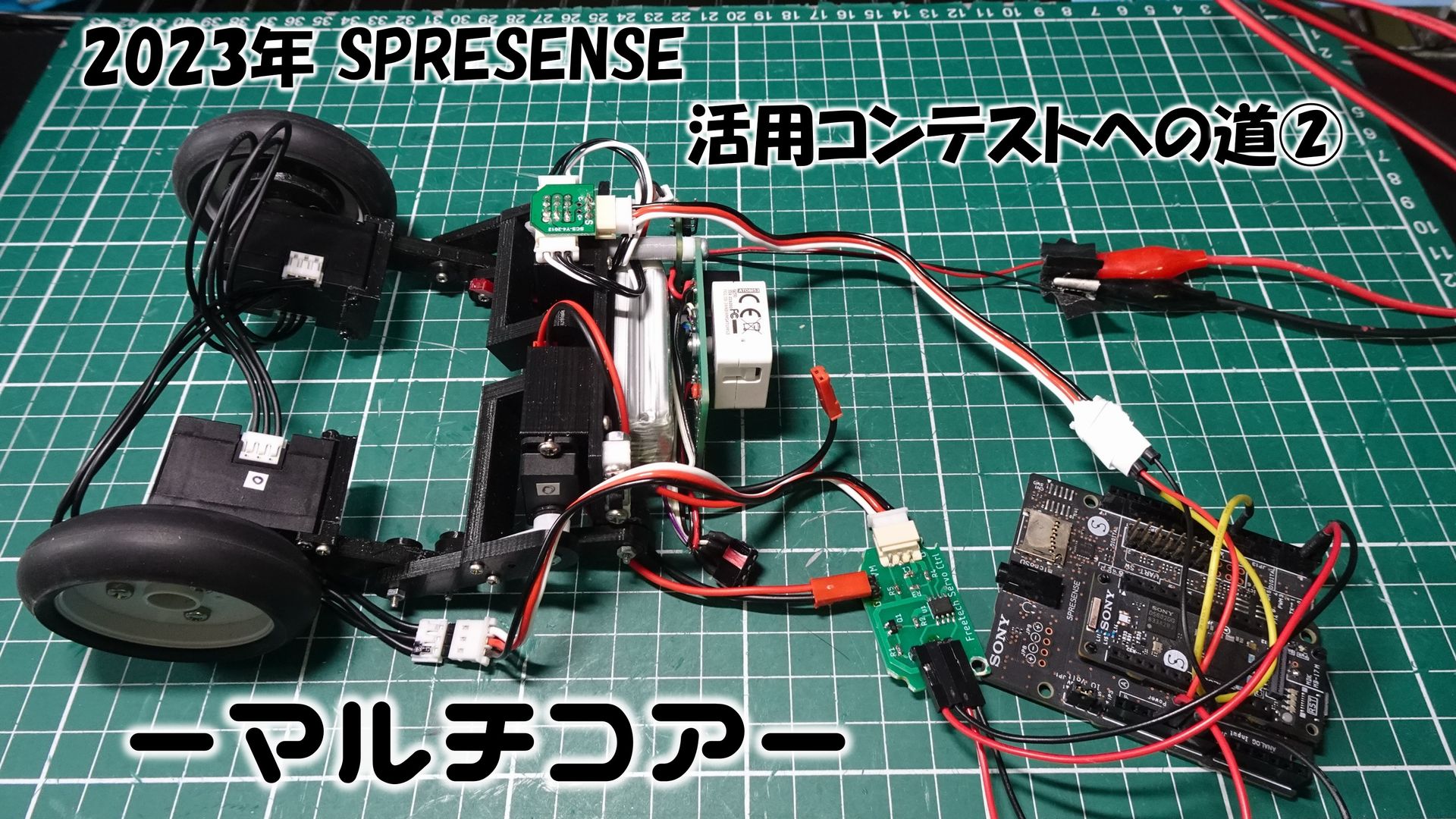
2023年 SPRESENSE活用コンテスト への道② ーマルチコアー
HomeMadeGarbage Advent Calendar 2023 |4日目 2023年 SPRESENSE活用コンテスト への応募に向けて前回は本連載を開始しました。 https://homemadegarbage.com/spresense23-1 シリ...
Advent Calendar / 電子工作 2023.12.4 お父ちゃん ![]()
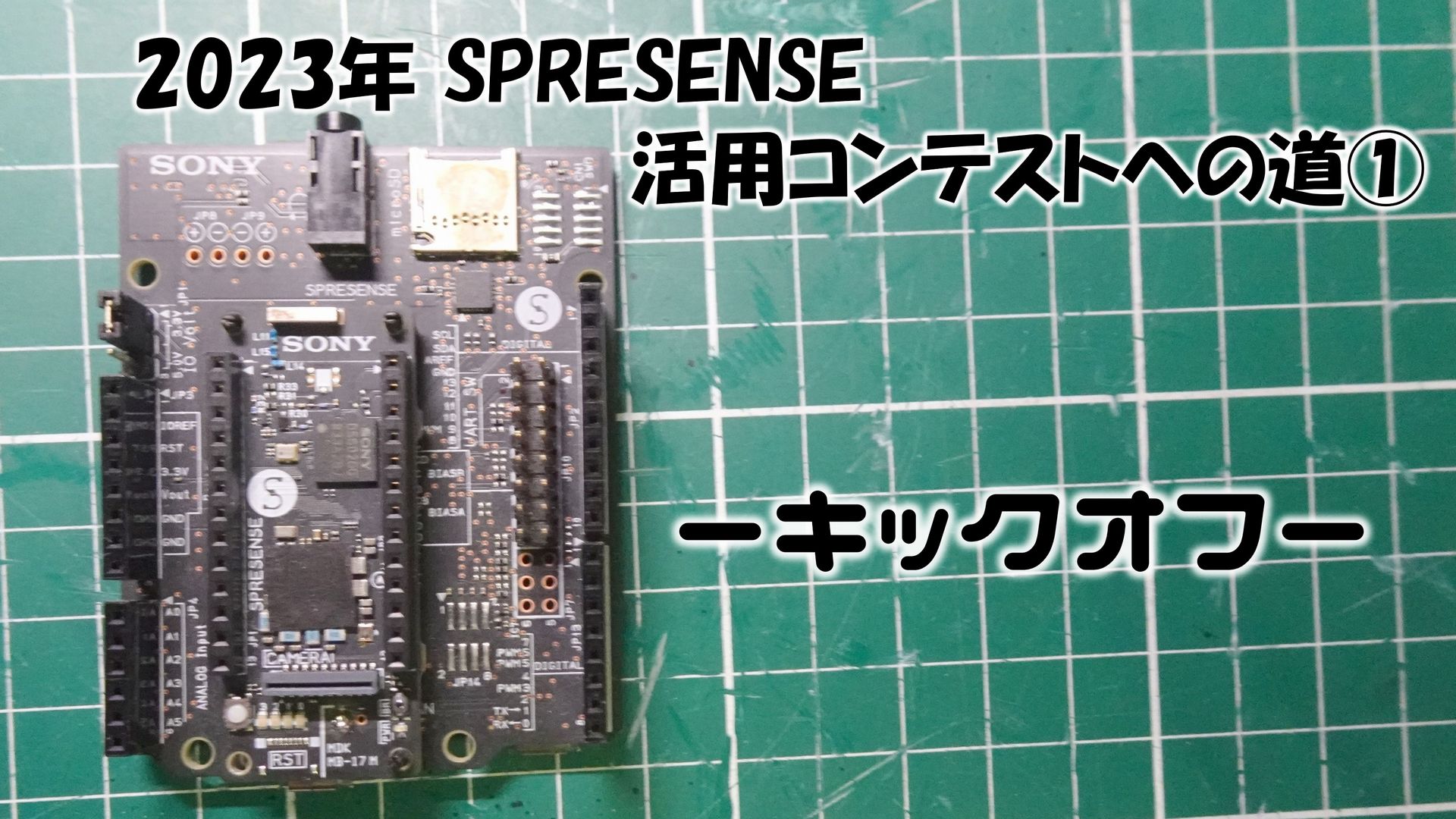
2023年 SPRESENSE活用コンテスト への道① ーキックオフー
HomeMadeGarbage Advent Calendar 2023 |2日目 去年も参加したSPRESENSE活用コンテスト に今年も参加予定です。 [bc url="https://elchika.com/promotion/spresense2023/#nav"] 今...
Advent Calendar / 電子工作 2023.12.2 お父ちゃん ![]()
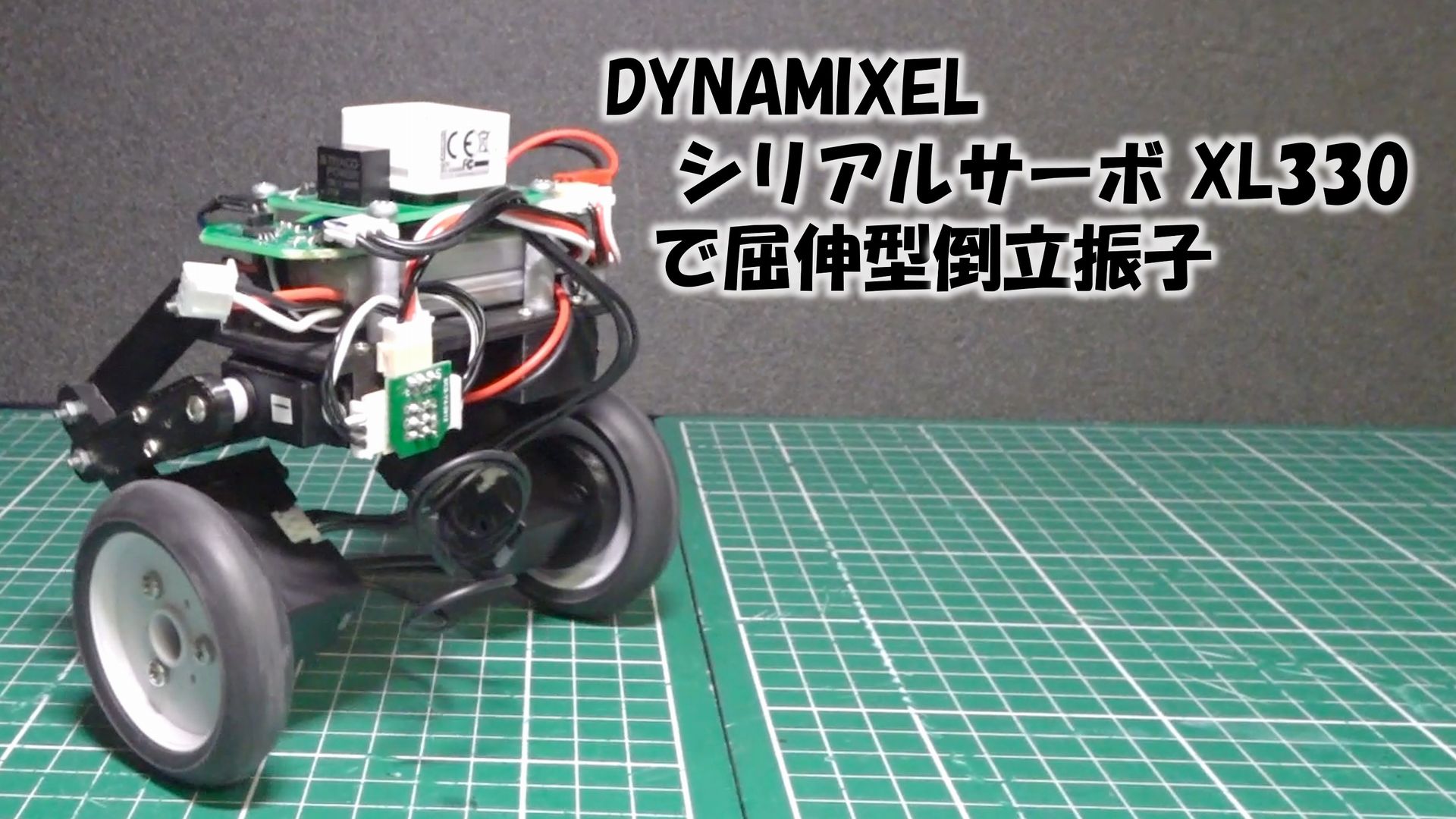
DYNAMIXEL シリアルサーボ XL330 で 屈伸型倒立振子
前回は DYNAMIXEL シリアルサーボモータ XL330-M077-T を用いて倒立振子を製作しました。 https://homemadegarbage.com/bala22 XL330-M077-T が非常に高速で応答性も良かったため、とても良い倒立振子が仕上がりました。 これに大変気を...