
NEWS
- 2025年12月01日 今年もやるで! HomeMadeGarbage アドベントカレンダー2025 NEW
- 2025年10月04日 HomeMadeGarbage the GARAGE 2025 開催しました
- 2024年12月01日 毎年恒例! HomeMadeGarbage アドベントカレンダー2024
- 2024年09月21日 HomeMadeGarbage the GARAGE 2024 開催しました
- 2024年05月13日 フリー画像サイトを公開しました
- 2024年05月01日 家庭内つぶやきサイト「Trash」を公開しました!
- 2024年02月29日 SPRESENSE 活用コンテスト ロボット部門 最優秀賞 & クレイン電子 アドオンボード特別賞 受賞
- 2023年02月01日 フリーBGM(2023年)のアルバムを配信しました
- 2023年12月01日 お待たせいたしました! HomeMadeGarbage アドベントカレンダー2023
- 2023年10月14日 HomeMadeGarbage the GARAGE 2023 開催しました
- 2022年12月01日 今年もやります! HomeMadeGarbage アドベントカレンダー2022
- 2022年10月14日 SPRESENSE 活用コンテスト IoT部門 優秀賞受賞
- 2022年10月07日 『HomeMadeGarbageの仕組みシステムRADIO』 配信開始
- 2022年09月03日 HomeMadeGarbage the GARAGE 2022 開催しました
- 2021年12月01日 今年もやります! HomeMadeGarbage アドベントカレンダー2021
- 2021年11月27日 ブログにNEWS欄を追加しました。
- 2021年11月26日 YouTube生配信!「姿勢制御装置 4段倒立 記録会」
- 2021年11月23日 みんなのラズパイコンテスト2021 優秀賞受賞




最新記事
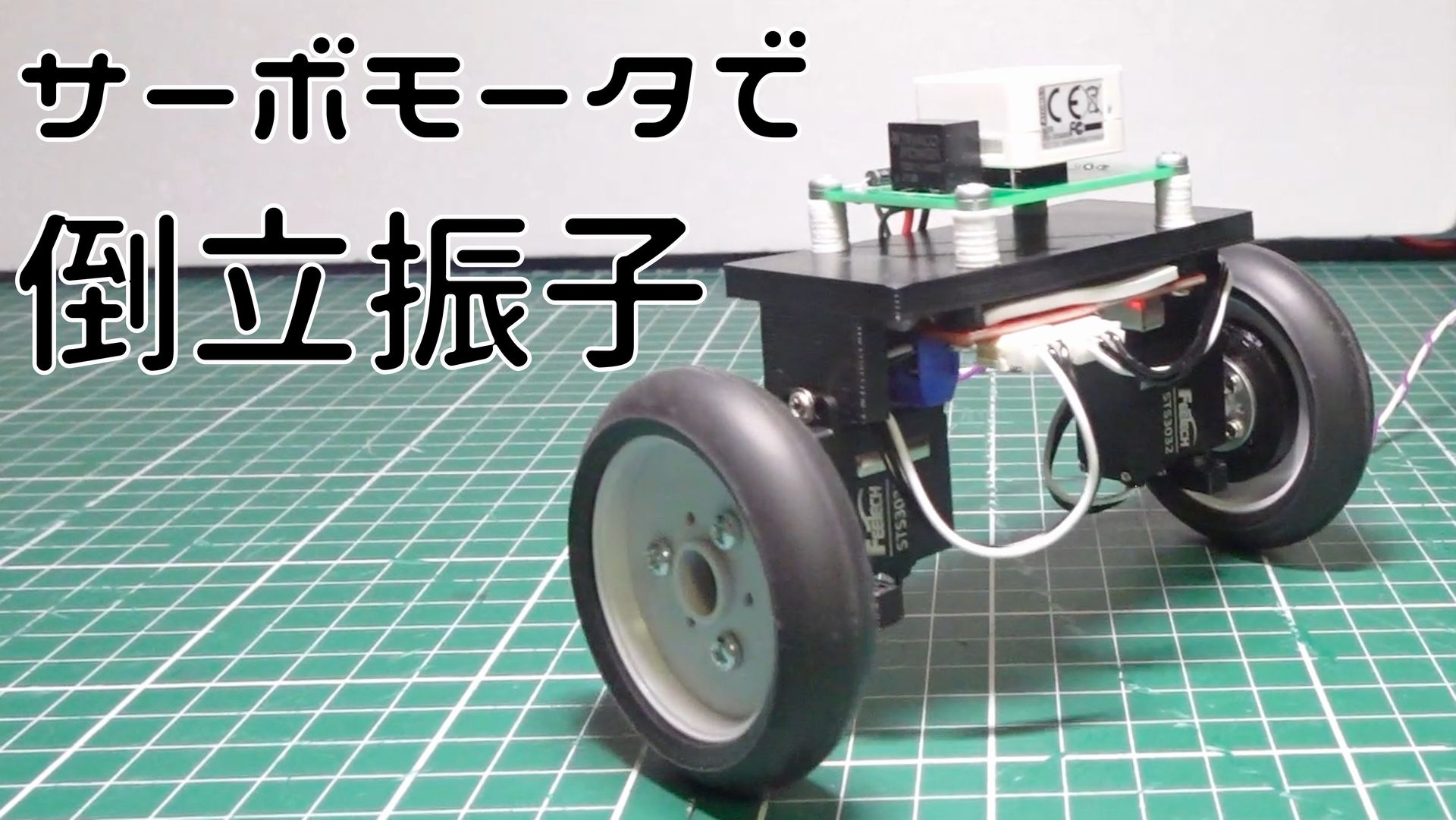
本当にサーボモータで倒立振子
前回はサーボモータを用いて足を構成してジャンプ動作の検討を実施しました。 https://homemadegarbage.com/bala13/ ここではサーボモータでホイールを制御する倒立振子を再び検討します。 https://twitter.com/H0meMadeGarb...
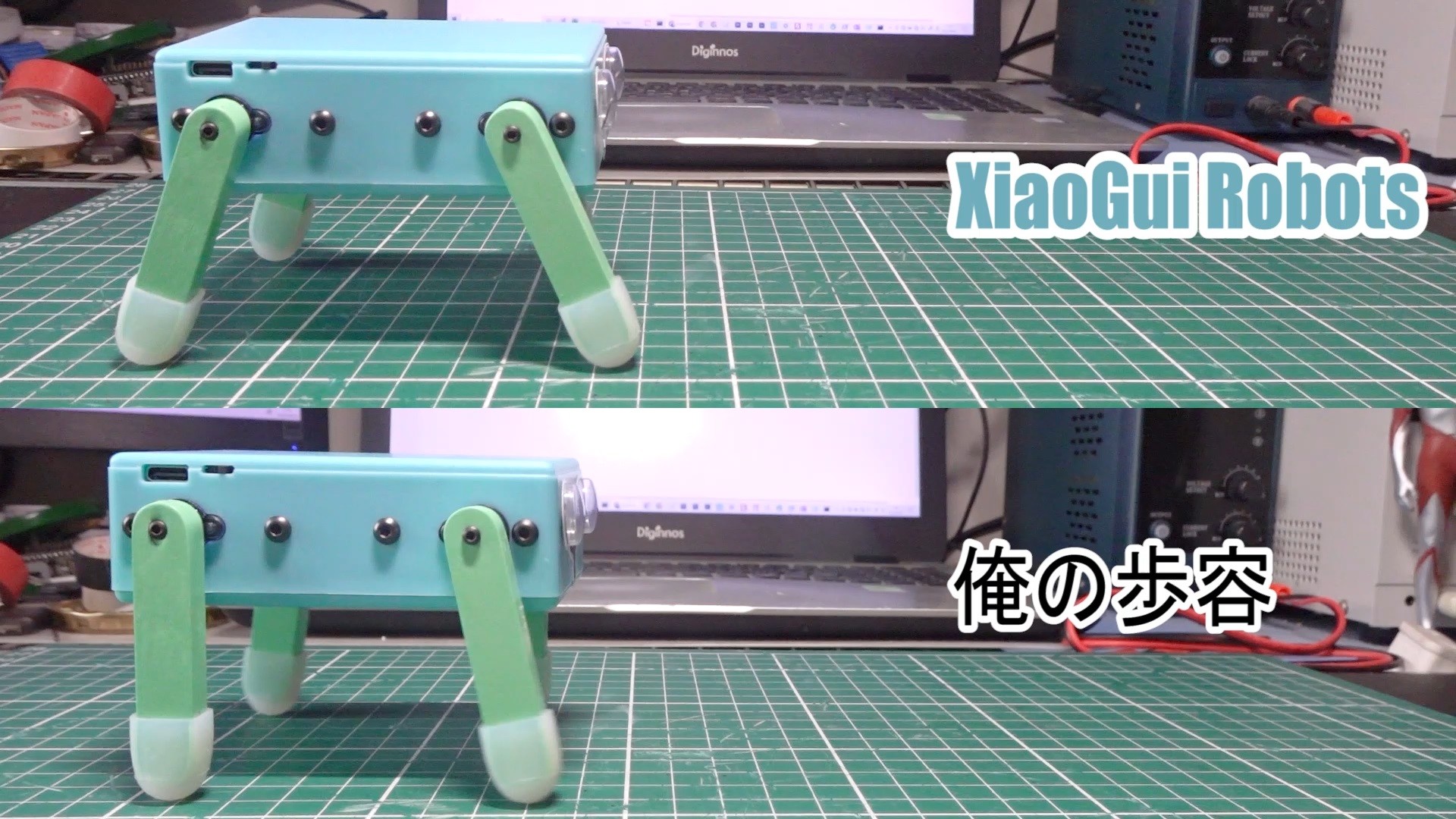
卓上小型ロボット犬の歩容研究
前回はブロックプログラミングでロボット動作の確認を実施しました。 https://homemadegarbage.com/xiaogui02// ここではサーボの角度を指定するブロックでロボット犬の歩容を勉強します。 歩容 さっそく前進のプ...
電子工作 2023.8.3 お父ちゃん ![]()
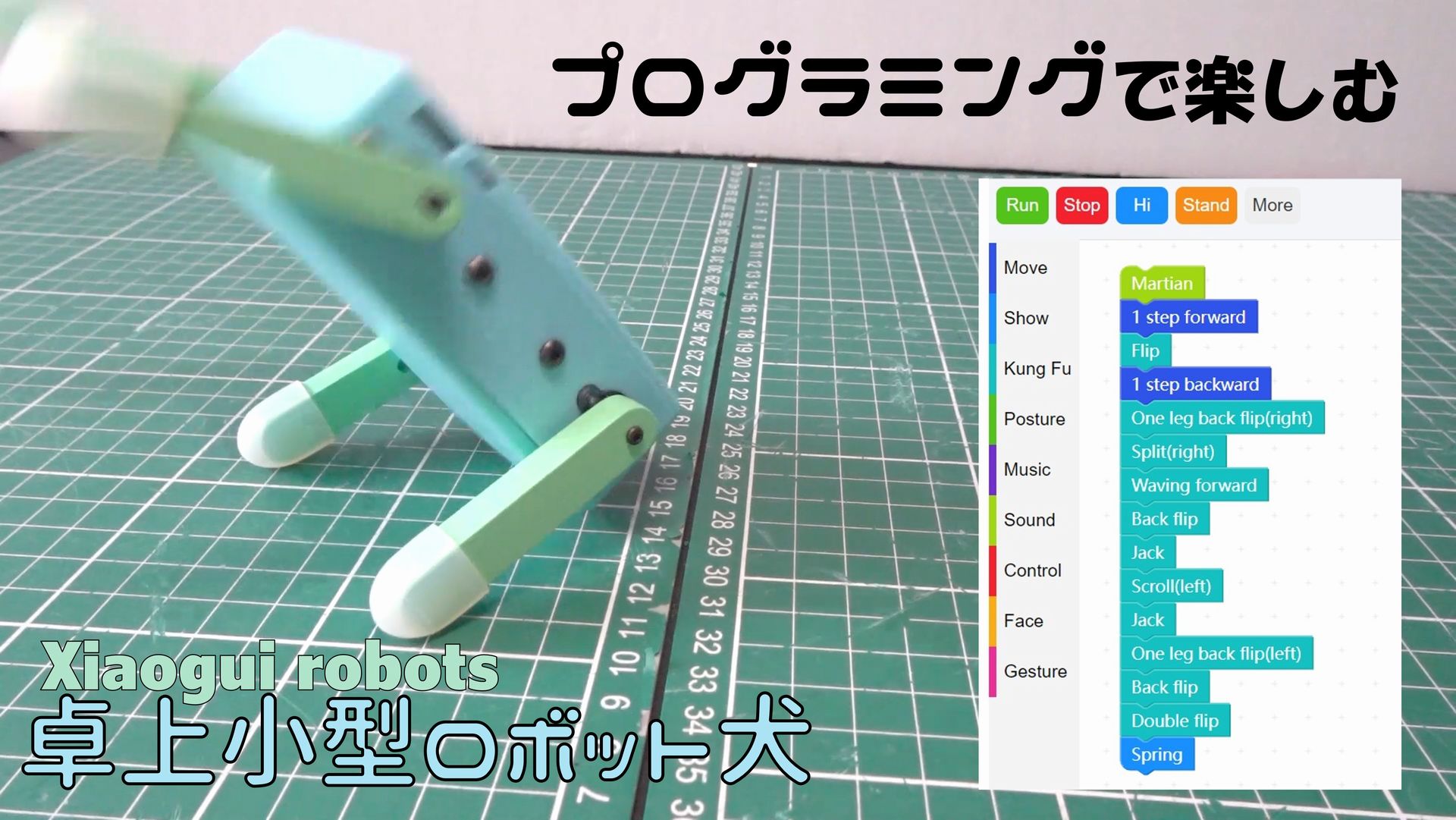
卓上小型ロボット犬をプログラミング
前回は いただいた4つのサーボによる小型ロボット犬の基本動作を楽しみました。 https://homemadegarbage.com/xiaogui01 ロボットの購入先は☟コチラ https://shop.guidan.com/products/xiaogui-robot-dog &...
電子工作 2023.8.2 お父ちゃん ![]()
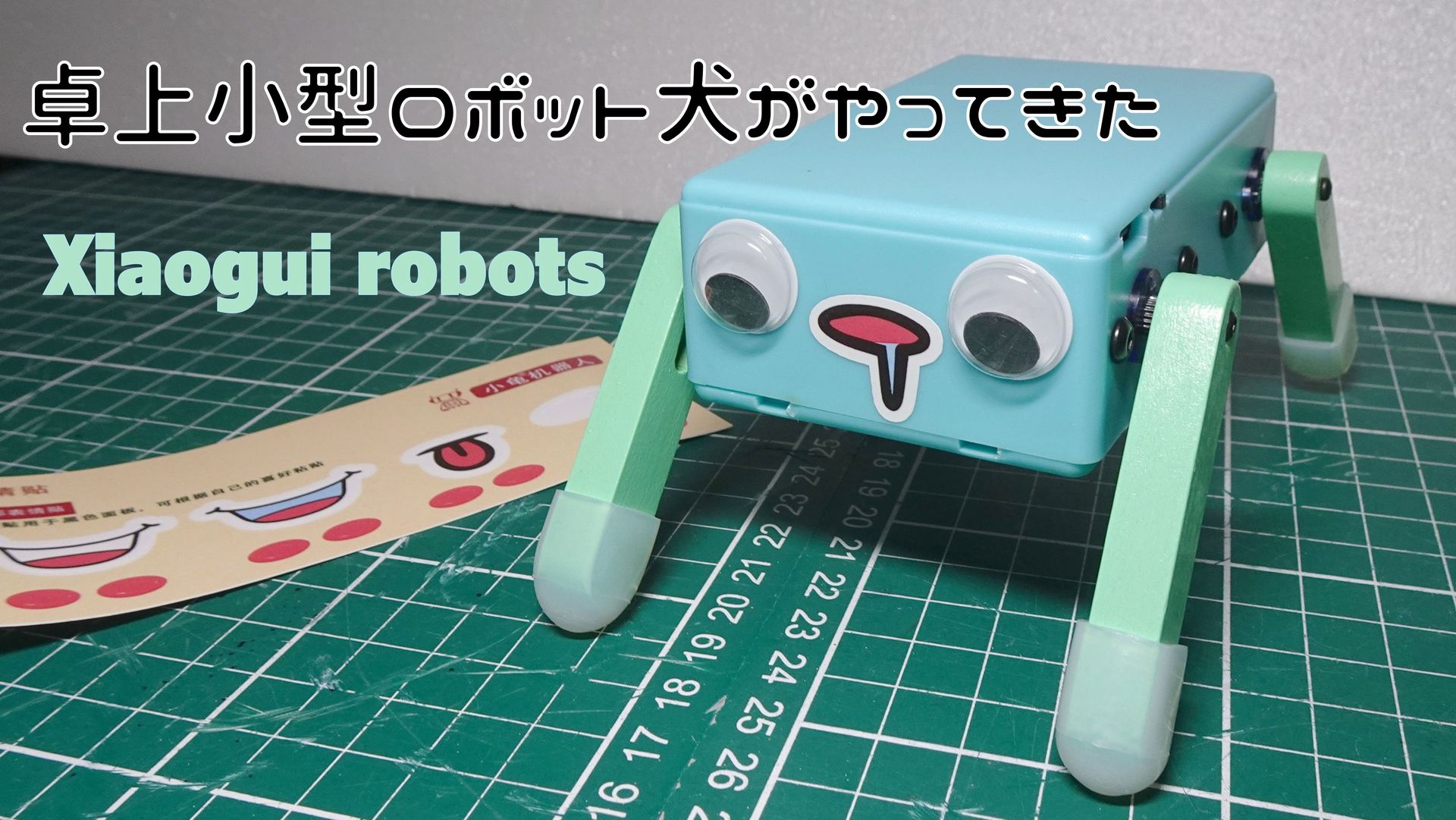
卓上小型ロボット犬がやってきた
なんと xiaogui robots (@wgy421) 様より小型ロボット犬のサンプルを提供いただけました!! ありがとうございます!!! 早速 組み立てて動かしましたので報告いたします。 The world smallest robot dog at ...
電子工作 2023.8.1 お父ちゃん ![]()

ダイソー で プラモ用のディスプレイスタンド を買った
ダイソー で プラモ用のディスプレイスタンド を買いました。 前々からほしかった商品なので大変うれしかったです。 プラモデル 去年 (2022年) から子供のころ以来でプラモ製作に目覚めまして、ちょくちょく作っていたわけですが。。 https://homem...
生活 2023.7.30 お父ちゃん ![]()
オンライン漢方診療 – 2023年7月 備忘録
オンライン漢方診療を受けて約1年程経過しました。 一年程、四逆散と桂枝茯苓丸をメインに色々加えた形の処方でしたが、 先月の診療で手湿疹を相談したところ、 四逆散が無くなり、柴苓湯が追加になりました。 手湿疹の方はかなり良くなったのですが、 今月はイライラが結構ぶり返してしまい......
生活 2023.7.30 お母ちゃん ![]()
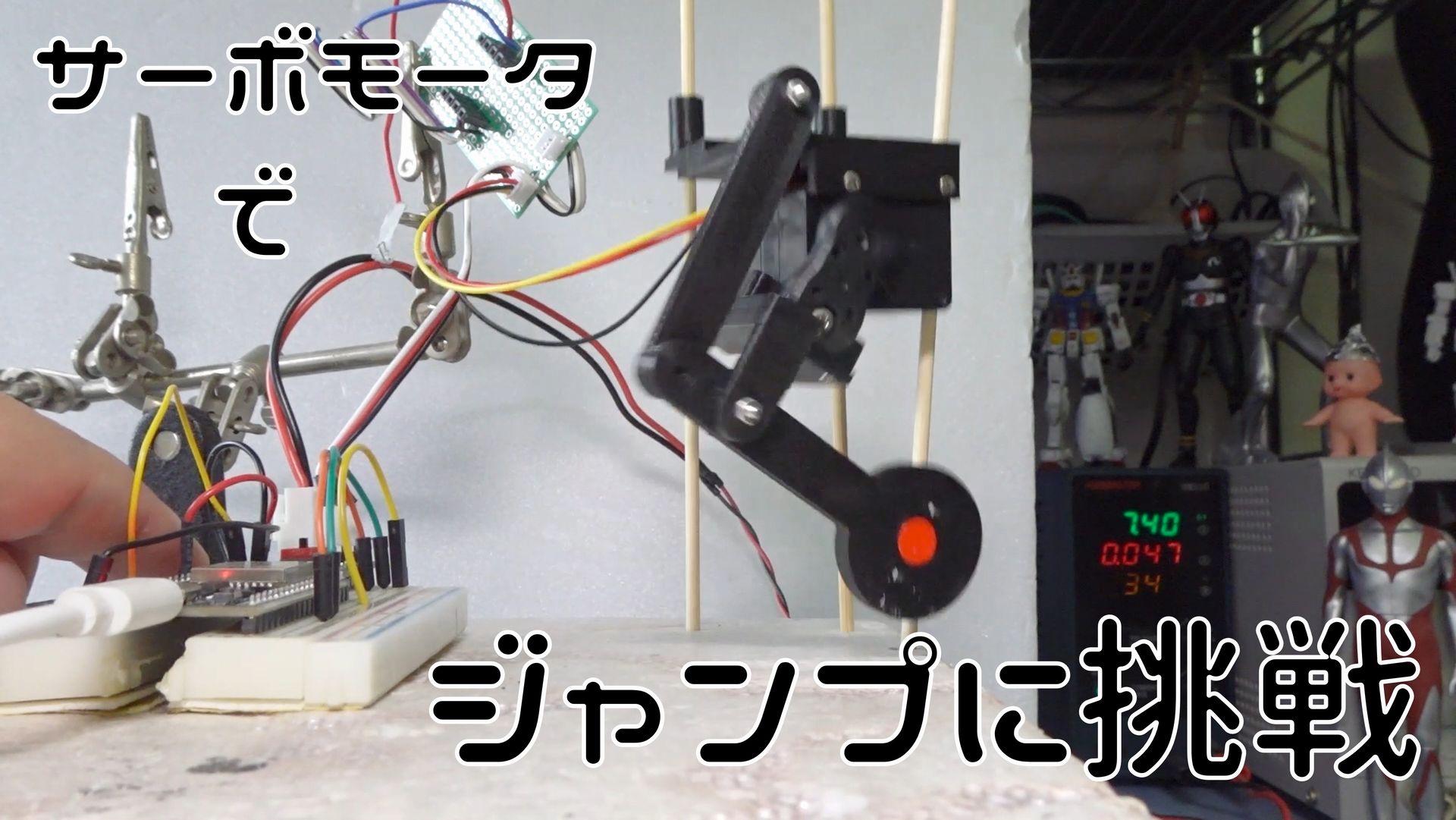
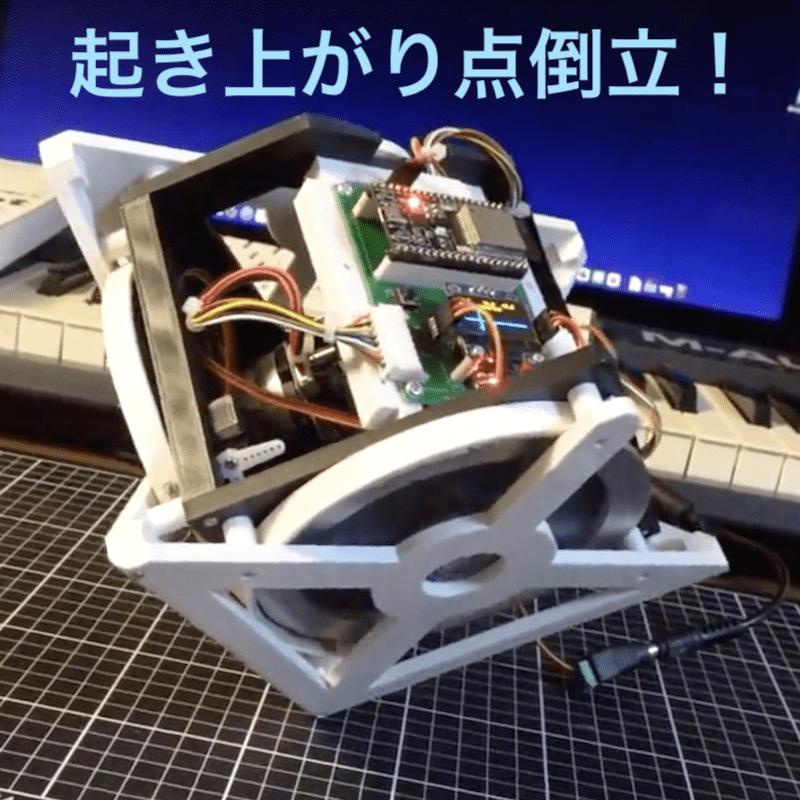
サーボモータでジャンプに挑戦
以前に屈伸タイプの倒立振子を製作しました。 https://homemadegarbage.com/bala11 この倒立振子をジャンプさせてみたくなったので検討します。 ジャンプする倒立振子 こんなすごい倒立振子を見つけました。 https://twitte...

2023年7月スキンケア備忘録
肌ラボ 白潤プレミアム 人気のこちら使ってみましたけど良い感じがする〜!! 使用して数日ですが肌が落ち着いてきた感じがします。 (来月のブログで書こうと思ってたけど思いのほか数日で効果を感じたので!) ダイソーのスプレー容器にも入れて日中もシュッシュ〜っとしています。 白潤ノーマルとプ...
健康/美容 2023.7.29 お母ちゃん ![]()
スクロール位置による動画の自動再生と停止
画面をスクロールして、 動画が画面の中央くらいに来た時に動画を再生し、 動画が画面外に行くと再生を一時停止する 固定ヘッダにも対応 See the Pen スクロール位置による動画の再生と停止 by HomeMadeGarbage (@hmg) on CodePen. こちらを...
Web 2023.7.27 お母ちゃん ![]()

AIロボット犬『XGO-lite2』を Python で味わう
前回はブロックプログラミング XGO-Blockly でXGO-lite2 の制御を楽しみました。 https://homemadegarbage.com/xgo-02 ここではPythonでXGO-lite2 を動かしてみたいと思います。 XGO2 は Makuakeク...
Raspberry Pi / 電子工作 2023.7.24 お父ちゃん ![]()

AIロボット犬『XGO-lite2』をプログラミングで味わう
前回はいただいた XGO-lite2 の基本動作を楽しみました。 https://homemadegarbage.com/xgo-01 ここではプログラミングで思いの通りにXGO-lite2 を動かしてみたいと思います。 XGO2 は Makuakeクラウドファンディングにて2023年の...
Raspberry Pi / 電子工作 2023.7.22 お父ちゃん ![]()

AIロボット犬『XGO-lite2』がやってきた
なんと AIロボット犬『XGO-lite2』を提供いただけました! https://twitter.com/H0meMadeGarbage/status/1682208773438406656 XGO2 は Makuakeクラウドファンディングにて2023年の7月21日から9月8日まで予約...
Raspberry Pi / 電子工作 2023.7.21 お父ちゃん ![]()
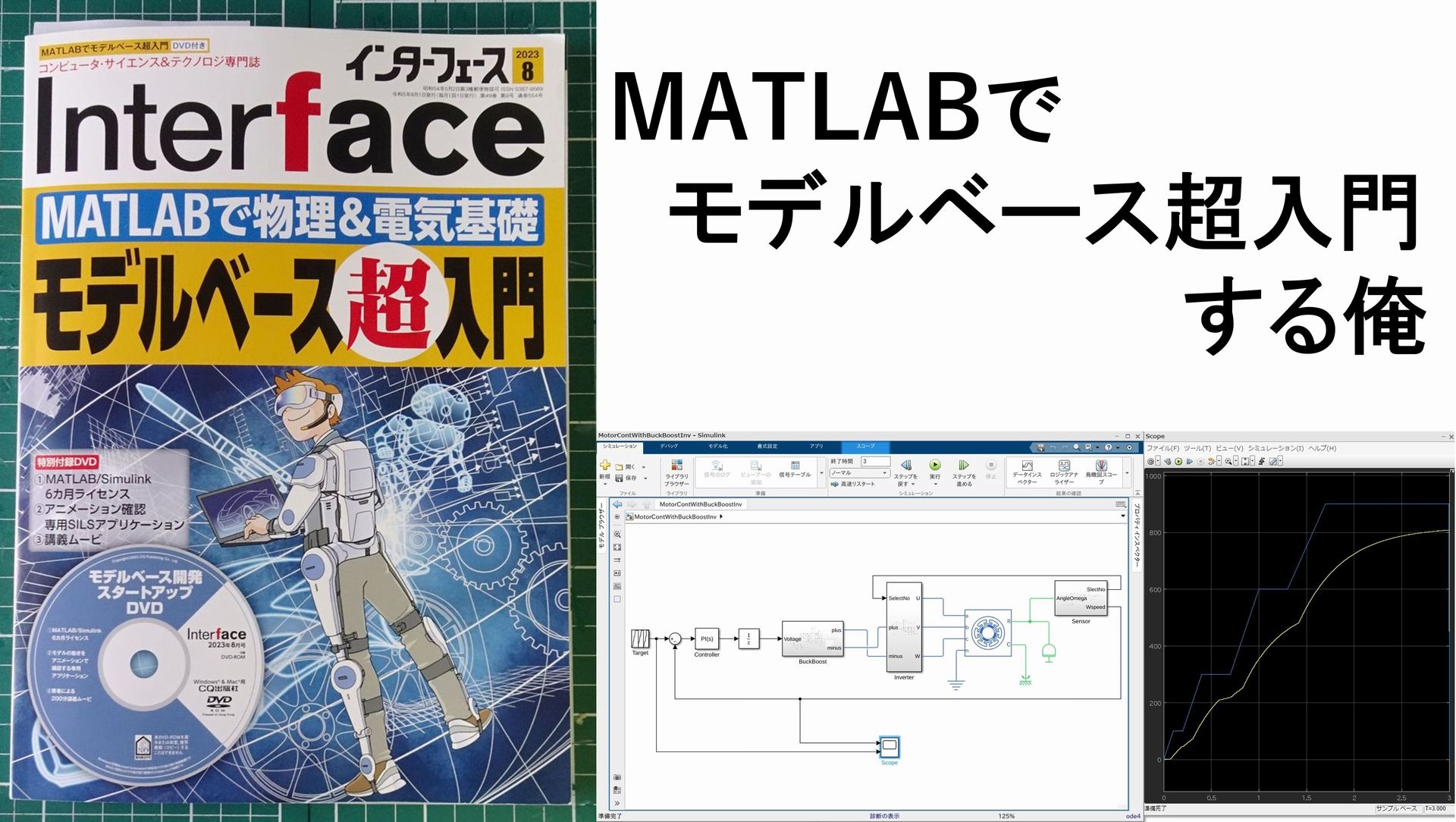
MATLABでモデルベース超入門する俺
Interface 2023年08月号 で モデルベース超入門という記事が掲載されておりました。 半年間の関連ライセンス解放とのことで大変いい機会なので勉強することにしました。 去年も同様の企画がありましたが全く手をつけずにライセンス期限を終えてしまったので今回こそは! ...
学問 2023.7.19 お父ちゃん ![]()
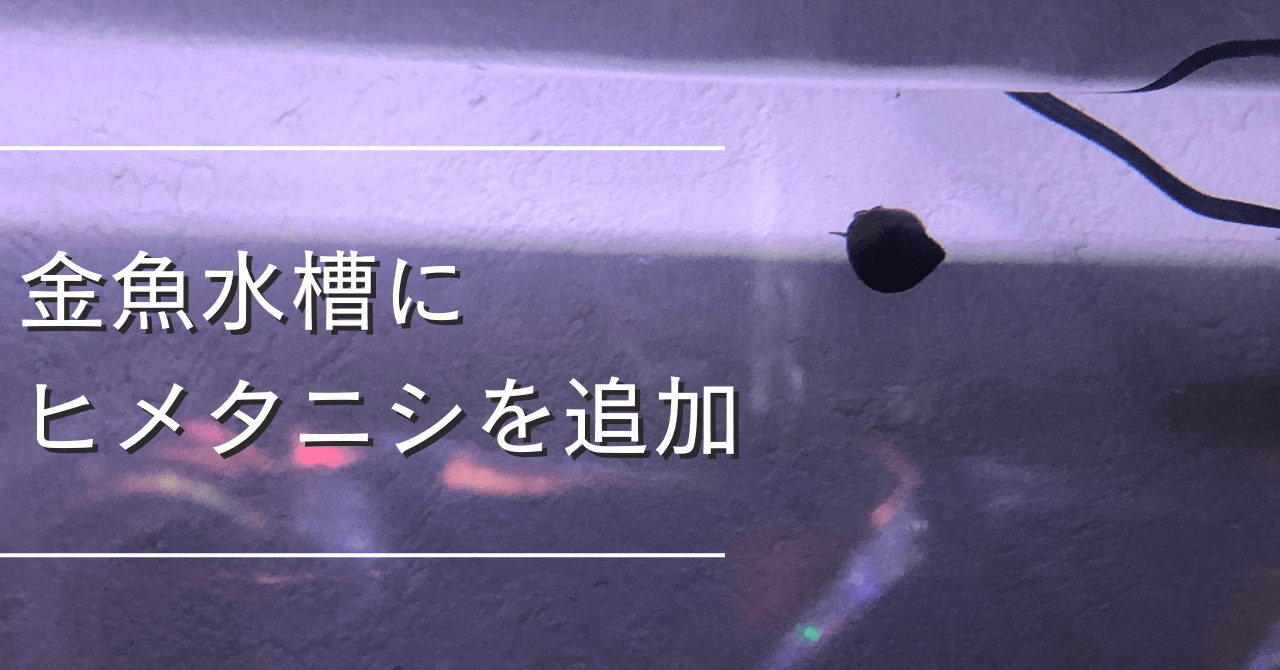
金魚水槽にヒメタニシを追加
金魚水槽に謎の貝が現れた事を機に貝について色々と調べていると 「ヒメタニシ」が欲しくなったので追加しました。 https://twitter.com/H0meMadeGarbage/status/1679879914982608898 ★補償付★【タニシ...
Twitterフォロワー10000人到達までにやったこと
目標としていたTwitter フォロワー数 10000人が遂に達成できました! 2021/12/7にフォロワー5000人達成しておりますので、1年半ほどかかったことになります。 https://homemadegarbage.com/twitter-5000 Twit...
ブログ 2023.7.17 お父ちゃん ![]()
