
NEWS
- 2025年12月01日 今年もやるで! HomeMadeGarbage アドベントカレンダー2025 NEW
- 2025年10月04日 HomeMadeGarbage the GARAGE 2025 開催しました
- 2024年12月01日 毎年恒例! HomeMadeGarbage アドベントカレンダー2024
- 2024年09月21日 HomeMadeGarbage the GARAGE 2024 開催しました
- 2024年05月13日 フリー画像サイトを公開しました
- 2024年05月01日 家庭内つぶやきサイト「Trash」を公開しました!
- 2024年02月29日 SPRESENSE 活用コンテスト ロボット部門 最優秀賞 & クレイン電子 アドオンボード特別賞 受賞
- 2023年02月01日 フリーBGM(2023年)のアルバムを配信しました
- 2023年12月01日 お待たせいたしました! HomeMadeGarbage アドベントカレンダー2023
- 2023年10月14日 HomeMadeGarbage the GARAGE 2023 開催しました
- 2022年12月01日 今年もやります! HomeMadeGarbage アドベントカレンダー2022
- 2022年10月14日 SPRESENSE 活用コンテスト IoT部門 優秀賞受賞
- 2022年10月07日 『HomeMadeGarbageの仕組みシステムRADIO』 配信開始
- 2022年09月03日 HomeMadeGarbage the GARAGE 2022 開催しました
- 2021年12月01日 今年もやります! HomeMadeGarbage アドベントカレンダー2021
- 2021年11月27日 ブログにNEWS欄を追加しました。
- 2021年11月26日 YouTube生配信!「姿勢制御装置 4段倒立 記録会」
- 2021年11月23日 みんなのラズパイコンテスト2021 優秀賞受賞




最新記事
AI音声「VOICEVOX」でボイスタグを作ってみた
フリートラックに入れている音声タグですが そろそろ新しいパターンも欲しいな〜と思いまして、、 現在使用しているボイスタグについてはこちら⬇ https://homemadegarbage.com/fiverr-producer-tag AI音声VOICEVOX ふとAI音声はどうだろ!と思...
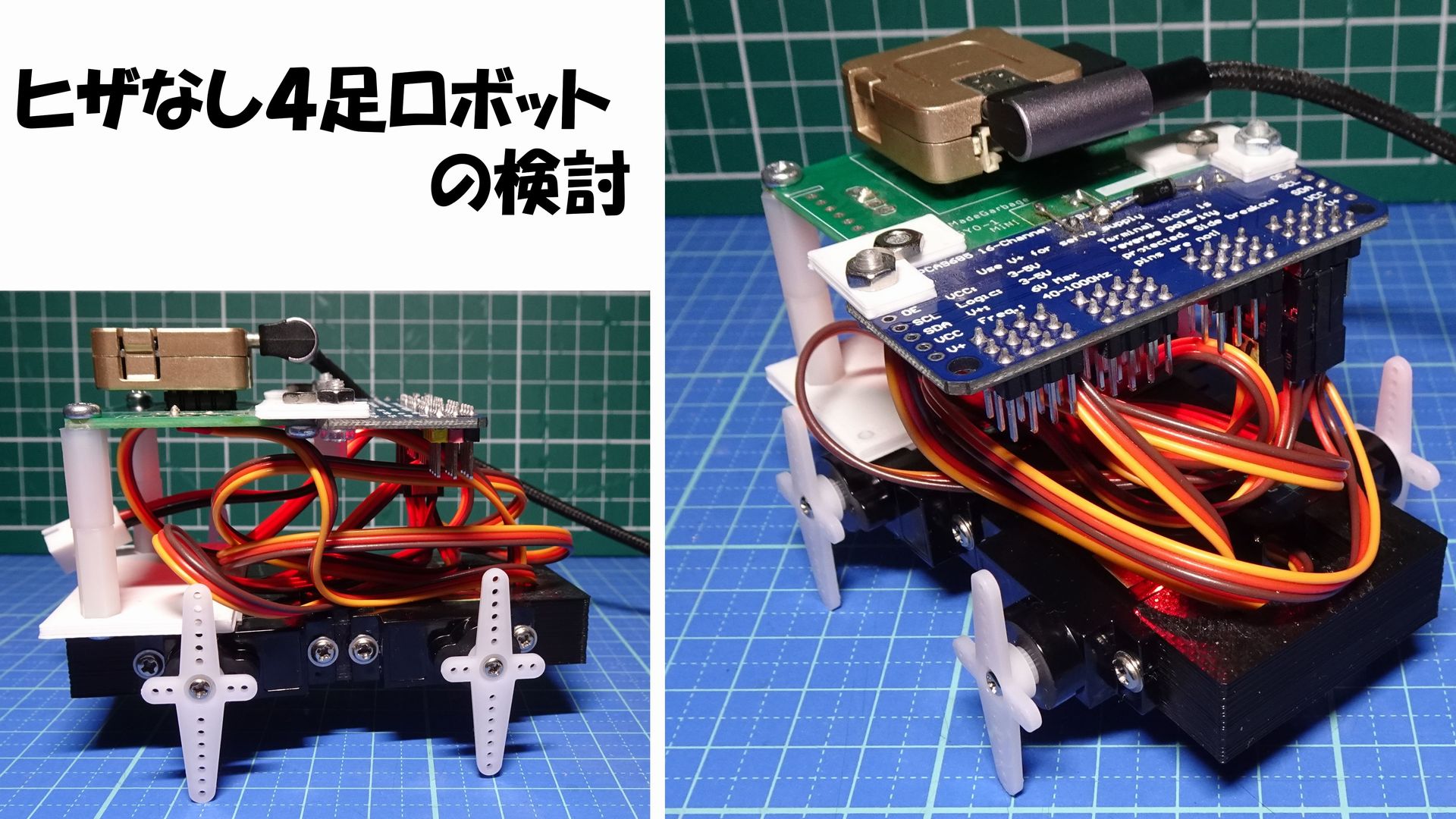
ヒザなし4足ロボットの検討
最近Twitter TL上で、ヒザのないシンプルな棒の足をした4足歩行ロボットをよく見かけます。 pic.twitter.com/SXzrf3KScq — 動物のおもしろ動画 (@nekonyan_dm) February 8, 2023 My robot dog name...
電子工作 2023.2.9 お父ちゃん ![]()
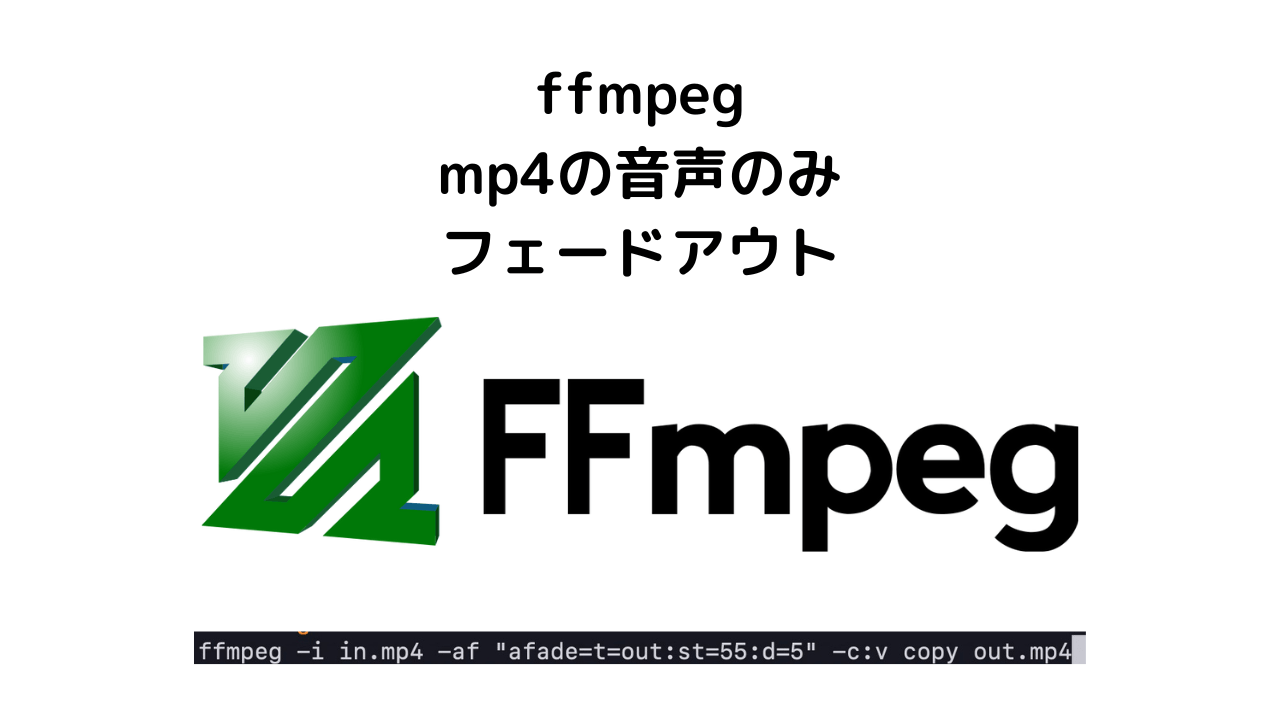
FFmpeg:動画の音声のみフェードアウト
Twitter用動画切り出しに音声フェードアウトしたくなったので、、 以下動画の音声のみフェードアウトさせる時のコマンドメモです。 ffmpeg -i in.mp4 -af "afade=t=out:st=55:d=5" -c:v copy out.mp4 "afade=t=out:st=55...
PC / スマホ 2023.2.9 お母ちゃん ![]()
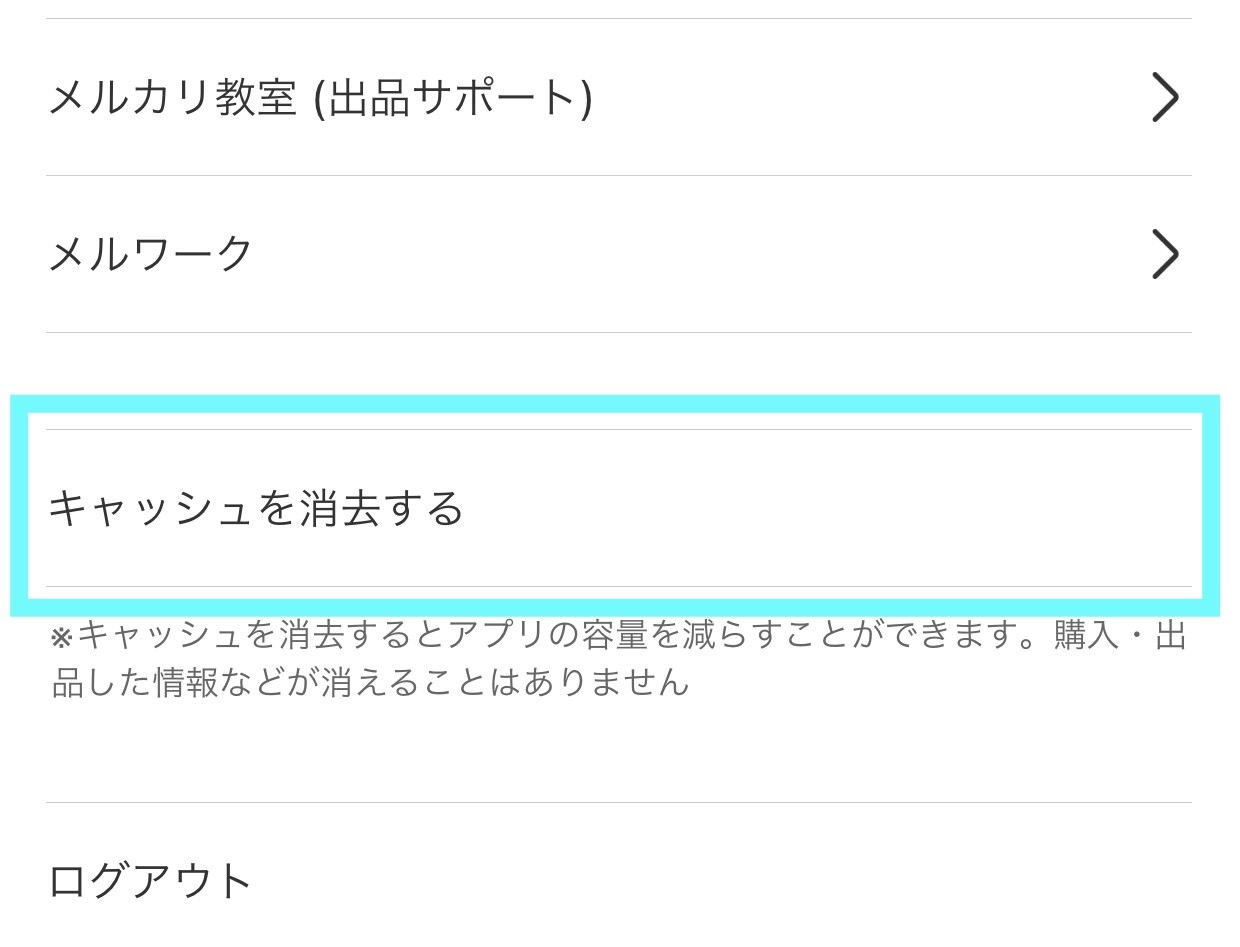
メルカリ:iPhoneで固まる→キャッシュ消去で解決
iPhoneのメルカリアプリで商品がタップ出来なくなる現象が頻発していたのですが、「キャッシュを削除」することでほぼ解決しました。 タップ出来ない時の対策法(応急処置)についてはこちらです⬇ https://homemadegarbage.com/mercari-tap ...
PC / スマホ 2023.2.8 お母ちゃん ![]()
30日後に Master of Puppets をマスターする俺
ふと メタリカの Master of Puppet を弾いてみたいと思い立ちました。 10代の頃にコピーした以来の約20年ぶりのメタリカ 全然ギター弾かなくなっちゃったのでゆっくりじっくり練習してメタルマスターを目指します。 現代はYouTubeにスコアや奏法動画がアップされているので...
音楽 2023.2.7 お父ちゃん ![]()
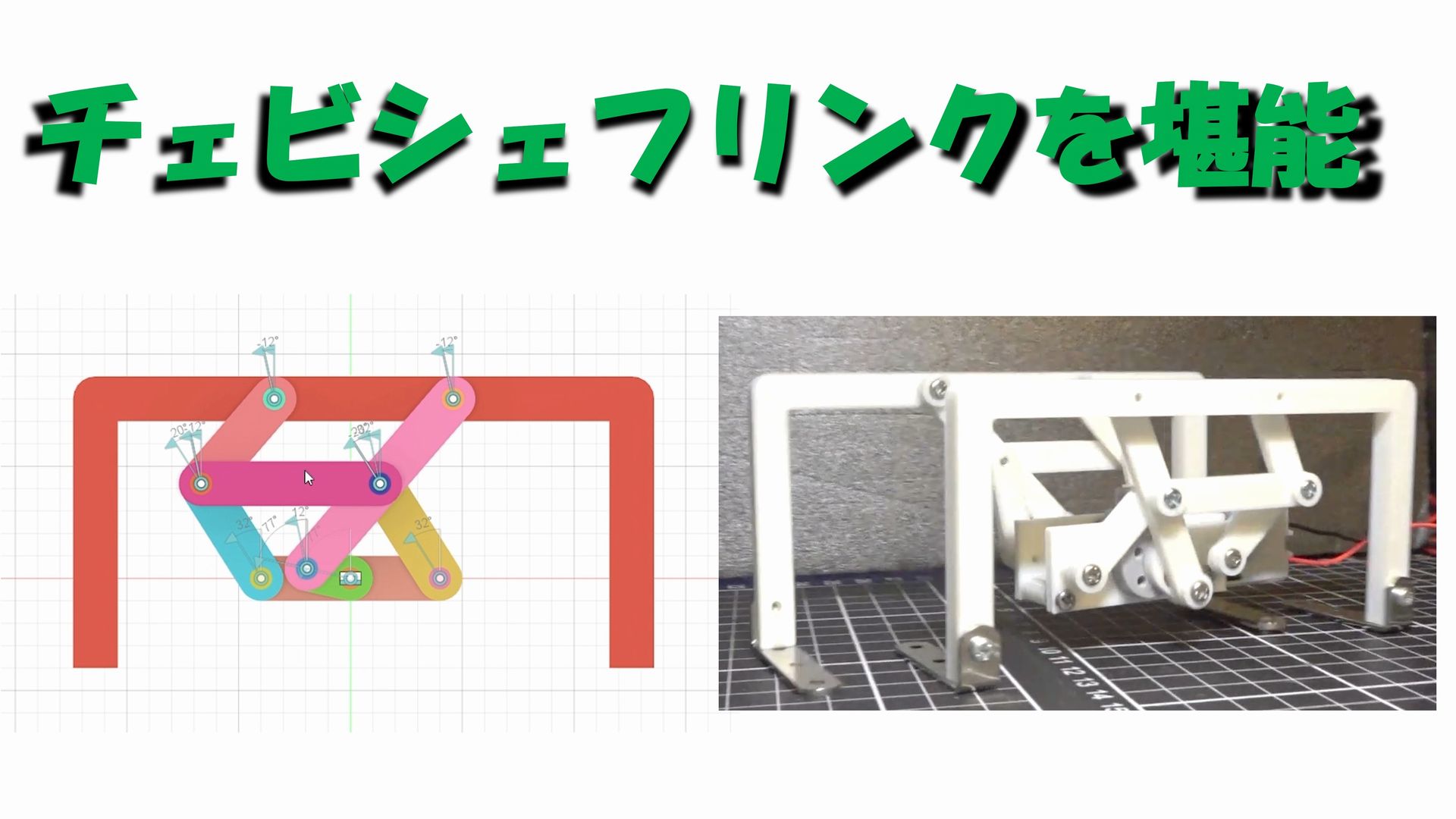
私のチェビシェフリンク学習
今回はリンク機構の一種であるチェビシェフリンクについて勉強しましたので報告いたします。 リンク機構につきましては、以前 平行リンクでロボット歩行の検討を実施しております。 https://homemadegarbage.com/onewalkerjr02 私自身はこういった機構...
工作・ハンドメイド 2023.2.4 お父ちゃん ![]()
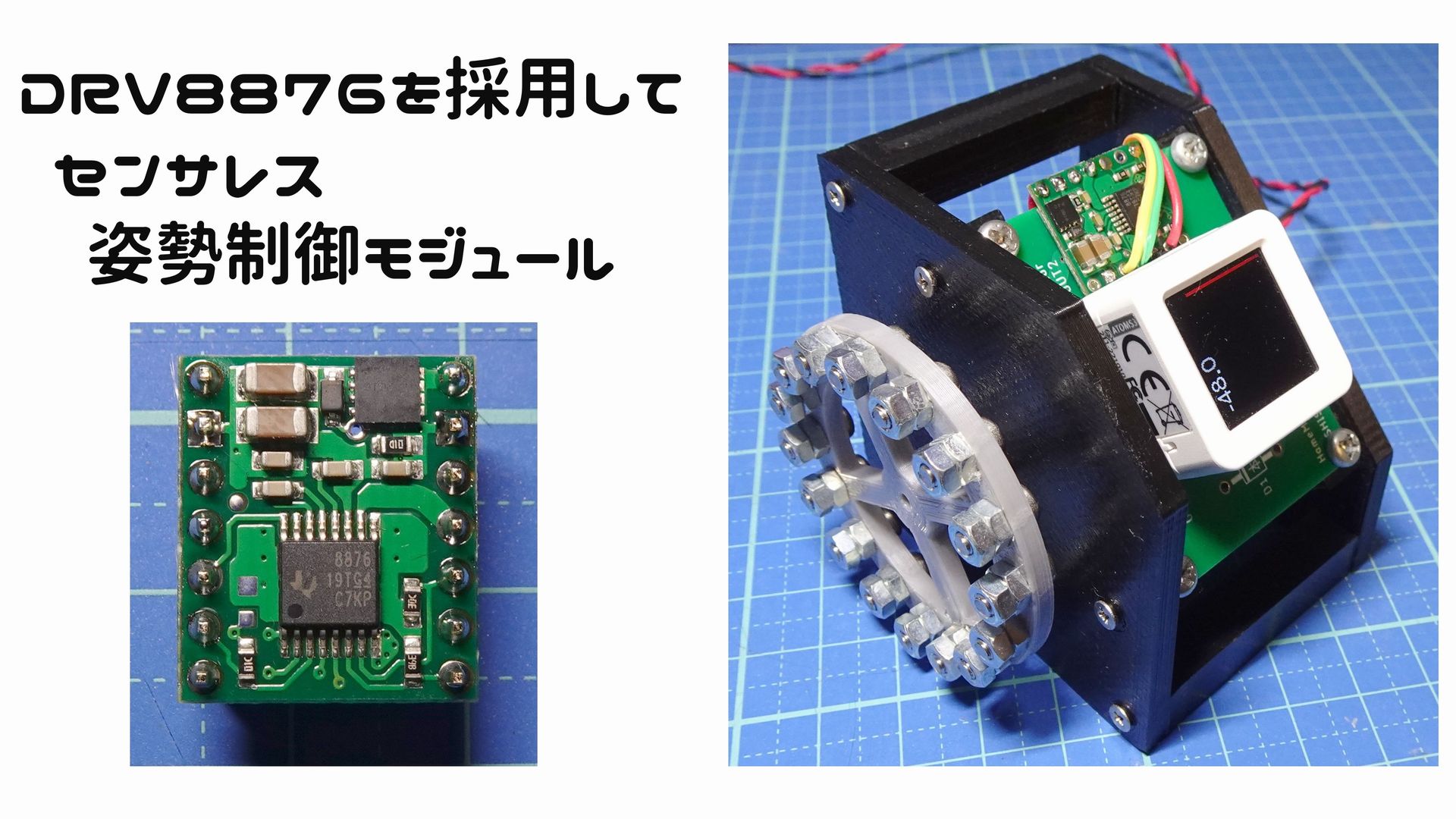
DRV8876を採用してセンサレス姿勢制御モジュール ーリアクションホイールへの道55ー
前回は電流センサでモータ電流を検知して回転速度を推定し、磁気エンコーダなしでのセンサレス姿勢制御モジュールの倒立動作を実現しました。 https://homemadegarbage.com/reactionwheel54// ここでは電流センシング機能付きモータドライバを採用して...
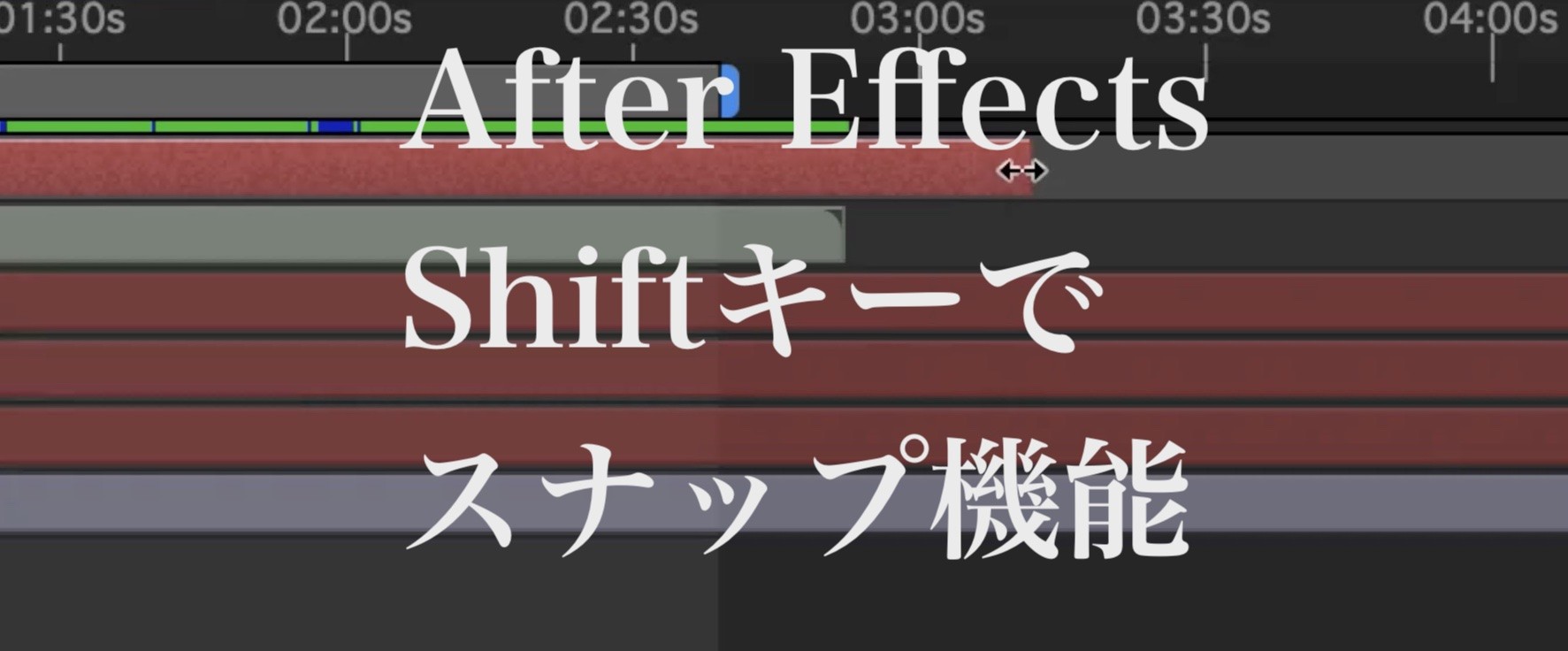
After Effects:タイムラインの端をピタッと合わせる
最近AEを使用していて、 タイムラインの右端を合わせるのが 手作業でどうにも面倒でしたが ピタッと合わせる「スナップ機能」があるのを知りましたw スナップ無し 微妙にズレる.. まぁいいかって感じで合わせてました💦 スナッ...
PC / スマホ 2023.1.31 お母ちゃん ![]()

WP:Simple GA Ranking でサムネイル表示
ブログのサイドバーにランキングを表示しており、 これまで「WordPress Popular Posts」を使用していましたが、 お父ちゃんより Google Analyticsのランキングと一致させたいとの要望を頂きました。 いきなり Google Analytics API を使うのはハー...
WordPress 2023.1.29 お母ちゃん ![]()
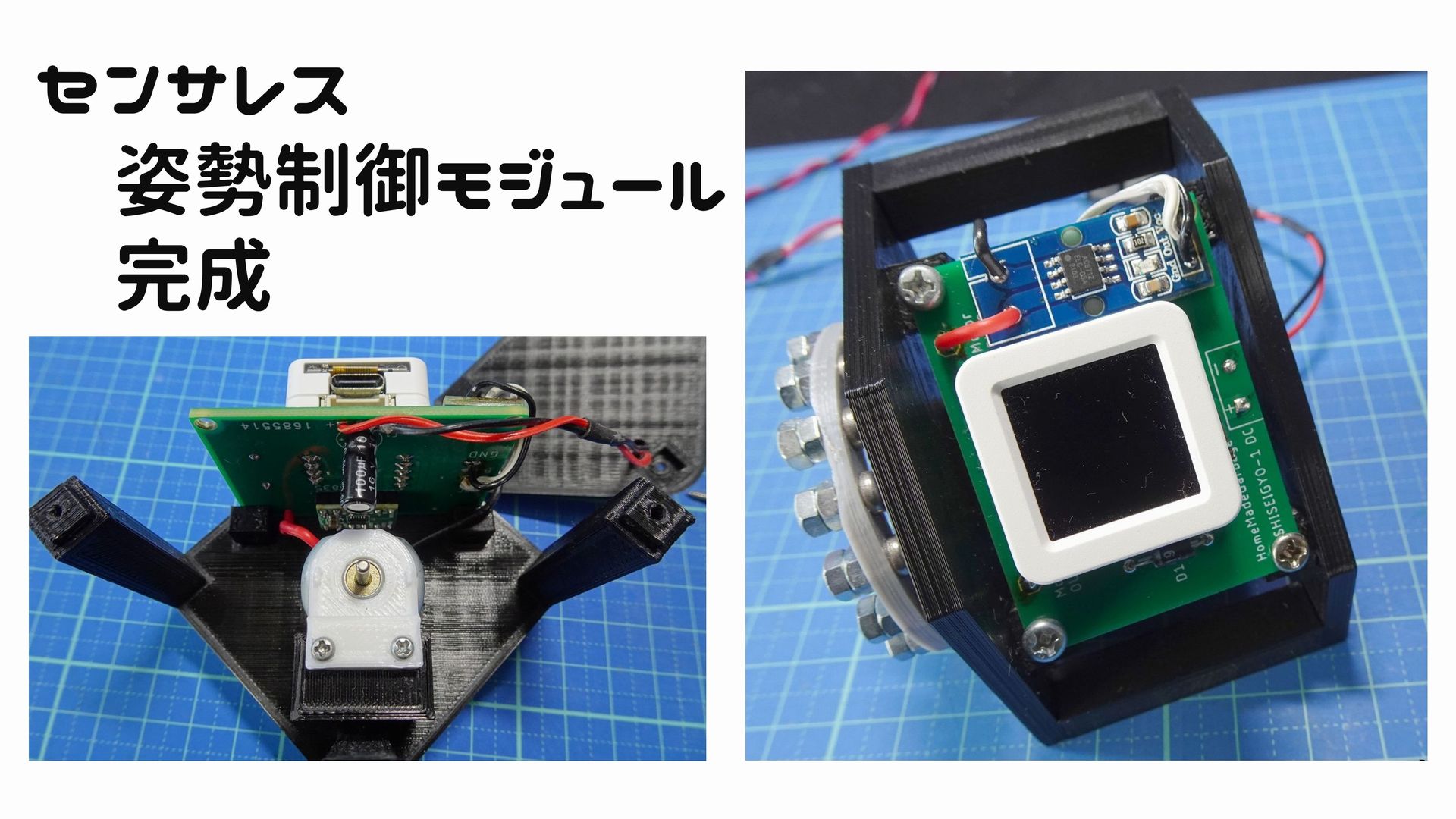
センサレス姿勢制御モジュール完成 ーリアクションホイールへの道54ー
先日は電流センサを用いて回転速度を推定するDCモータのセンサレス制御について学習しました。 https://homemadegarbage.com/dcmotor01 ここではこのセンサレス回転速度制御を姿勢制御モジュールに応用してみます。 SHI...
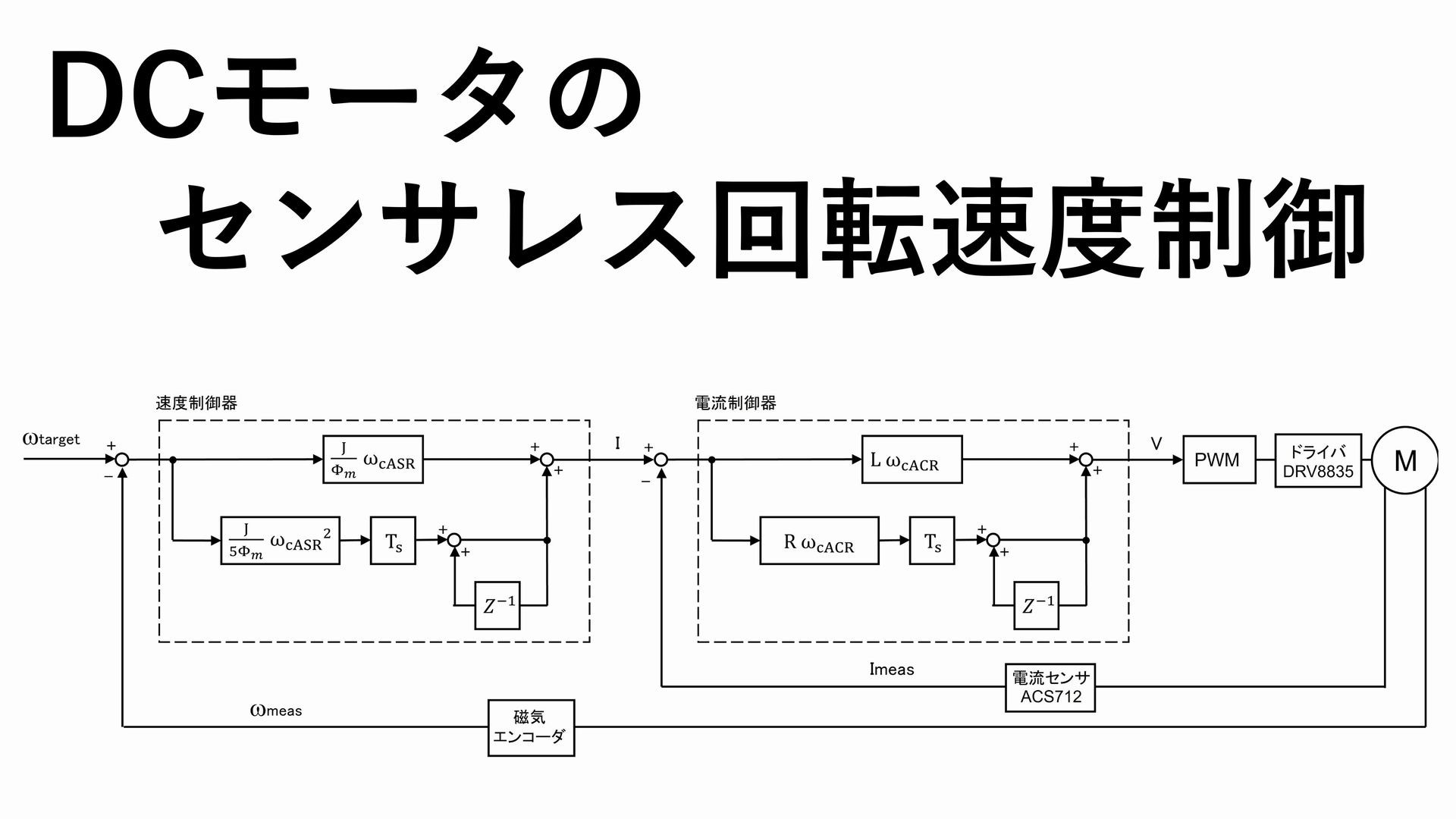
DCモータのセンサレス回転速度制御
先日、現代制御理論の基礎を学習いたしました。 https://homemadegarbage.com/30daysmodernctrl-03 [amazonjs asin="4065301211" locale="JP" title="はじめての現代制御理論 改訂第2版 (KS理工学専門書)"]...
電子工作 2023.1.26 お父ちゃん ![]()


メルカリ:iPhoneアプリでタップ出来ない時の対処法
iPhone 8 Plus を使用しているのですが、 メルカリアプリでタップ出来なくなる状況が頻発しています。 今までは一旦アプリを終了して再起動していたのですが、 再起動しなくても一旦他の画面に遷移して戻ると治っていることがわかりました。 例えばメルカリアプリの「...
生活 2023.1.21 お母ちゃん ![]()
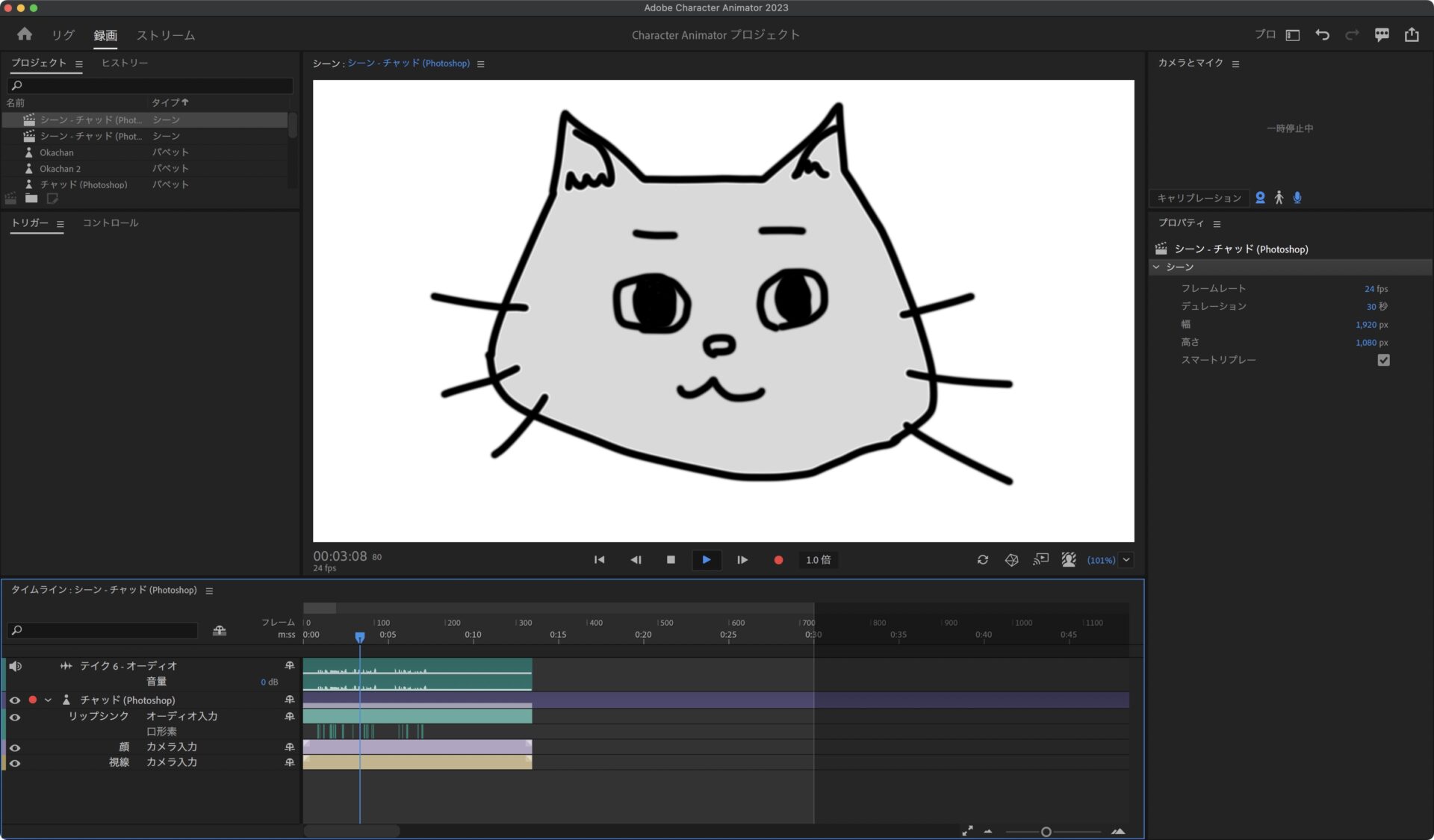
VTuber計画 !? ② Adobe Character Animator でパペットを作ってみた
前回 Adobe Character Animator の「スターターモード」を試してみました。 https://homemadegarbage.com/vtuber-1 今回は自作の「パペット」を作ってみました。 パペットを作成する方法 パペットの作成について公式ページ Adobe Ch...
Web 2023.1.16 お母ちゃん ![]()
